小型ダイレクトドライブモータのマイクロテック・ラボラトリー
- 小型ダイレクトドライブモータのマイクロテック・ラボラトリー
- 導入事例 旧
- 小型・低摩擦アクチュエータMagLinkageを備えた多指ハンドシステム
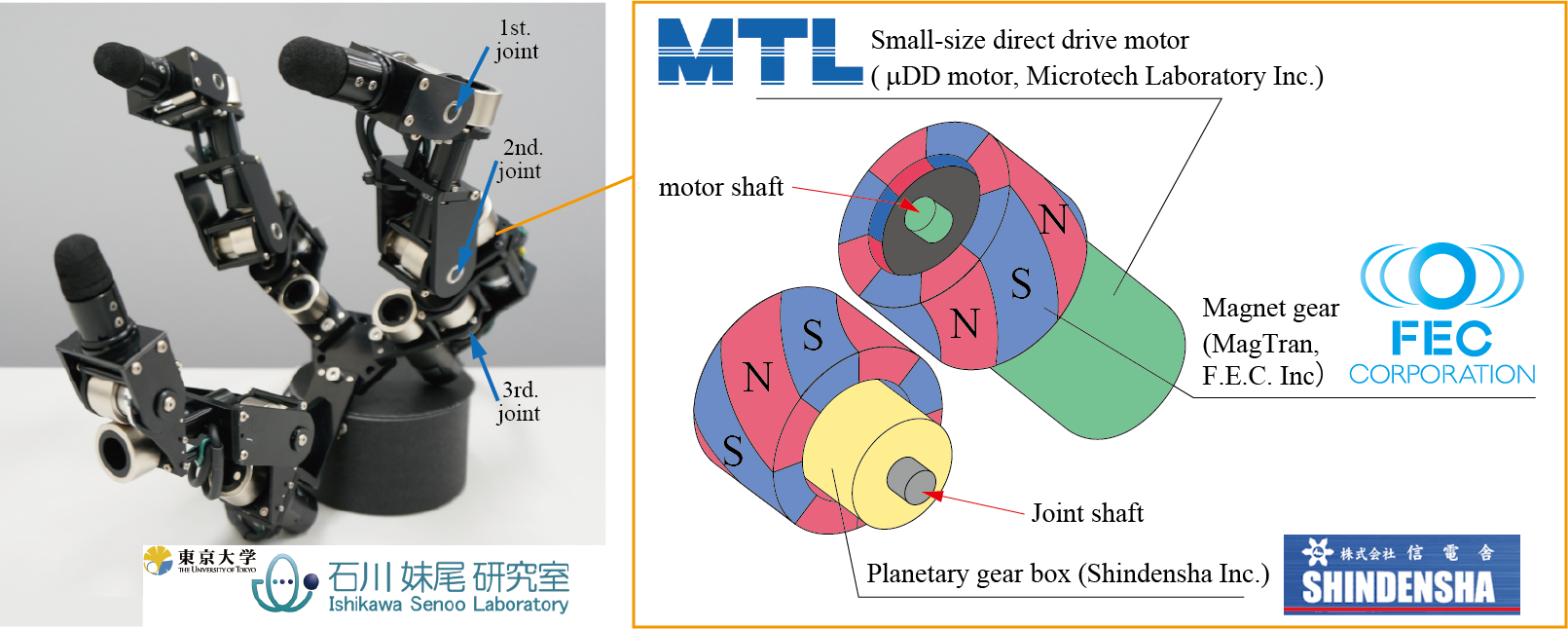
小型・低摩擦アクチュエータMagLinkageを備えた多指ハンドシステム
壊さない、壊れないロボットハンド
- 人間のように、衝撃吸収をしながら高速把持 -
ユーザ:東京大学石川グループ研究室 / 大阪大学原田研究室
開発者HP:https://kk-hs-sa.website/index.html
2019国際ロボット展にて展示致しました。
採用モータ
| 型名 | 製品名 | 備考 | |
| 1 |
MDS-1318-11B |
超小型ダイレクトドライブモータ |
外径φ13mm |
| 2 |
MDS-2018-36KE |
超小型ダイレクトドライブモータ |
外径φ21mm |
| 3 | サンプル納入実施中 |
|
従来のロボットではできない駆動が可能です。
製品のお問い合わせはこちら
042-746-0123
受付 / 平日9:00~17:30

