小型ダイレクトドライブモータのマイクロテック・ラボラトリー
よくある質問
目次
クリックで項目までスクロールします。
キーワード検索
人気キーワード 「電源」「上位」「原点復帰」「位置指令」「エラー」「三菱」「グラフ」「実行電流値」
μDDモータの仕様につきまして
- μDDモータはどのような種類のモータでしょうか?
-
ACサーボモータです。ドライバ電源電圧はDCですが、内部は三相PMロータです。超低速~高速まで滑らかな位置速度制御や、高精度電流制御が可能です。
- μDDモータはなぜ高精度位置決めが可能なのでしょうか。
-
MTLのモータコアは他社の一般的なモータに比べてスロットを細かく分割しております。また一体設計しているエンコーダの分解能が高く、より細かい位置を監視している為に高精度の位置決めが可能となっています
- μDDモータを使用した装置の特長として「静音性」とあるが、なぜ静かになるのでしょうか。
-
モータの高回転による機械的な摩擦音や減速機による摩擦の摺動音は、ダイレクトドライブ機構にて装置を製作されることでなくなるためです。
- 軸に直接負荷をかけて良いでしょうか。
-
高剛性軸受を採用していますので、直接負荷をかけても問題ありません。ただし、カタログに記載しております許容荷重を超えないようにご注意ください。
- 微細角度での往復動作を検討しているが、懸念点はありますか?
-
微細角度の往復動作はベアリングの寿命を著しく縮めてしまうため、非推奨です。
始業前運転等で1日に1度1回転させることで寿命短縮を抑えることができます。
- 垂直方向での使用を検討しているが、懸念点はありますか?
-
μDDモータは高いバックドライバビリティが特徴ですので、垂直方向での駆動および保持については不向きです。
垂直方向でのご使用の場合は、サーボオフ時の安全確保やブレーキ、減速機との併用を推奨いたします。
- 中空軸タイプのモータを使用していますが、中空軸内径の中間に段があります。不良品でしょうか?
-
MDH-20、MDH-30、MDH-40の中空軸はトンボ加工により製作しております。
したがって、中間に段ができてしまいます。中空軸内に軸を通す場合は、図面寸法よりもやや小径のものをご使用ください。
- エンコーダの種類はインクリメンタルですか?アブソリュートですか?
-
どちらも用意がございます。型式末尾が「E」がインクリメンタル(324KEの場合、324,000パルスのインクリメンタルエンコーダ)、「B」がアブソリュート(20Bの場合、20bitのアブソリュートエンコーダ)となります。
詳細については以下製品紹介ページをご覧ください。
製品紹介ページ
- 回転軸精度はどのくらいでしょうか?
- 回転軸に位置決めピンの追加カスタムは可能でしょうか?
-
可能です。ご希望のピン配置とサイズをご連絡ください。
お問い合わせフォーム
- 分解能を下げることで、回転数はどの程度まで上がりますか?
-
MD-20(4逓倍後分解能4,480パルス):約4,000rpm
MD-30(4逓倍後分解能13,500パルス):約1,700rpm
MD-40(4逓倍後分解能324,000パルス):約1,500rpm
MD-70(4逓倍後分解能1,296,000パルス):約550rpm
エンコーダの応答周波数以上回転させると、磁極位置の累積誤差が発生し、出力トルクが減少していく現象が発生します。(サーボONOFFにより直ります。)上記回転数は実力値ですので詳細はお問い合わせください。
お問い合わせフォーム
- 減速機付きのμDDモータはありますか?
- ブレーキ付きのμDDモータはありますか?
- ノイズの対策方法を教えてください
-
下図を参照してください。なお、以下の点にご注意ください。
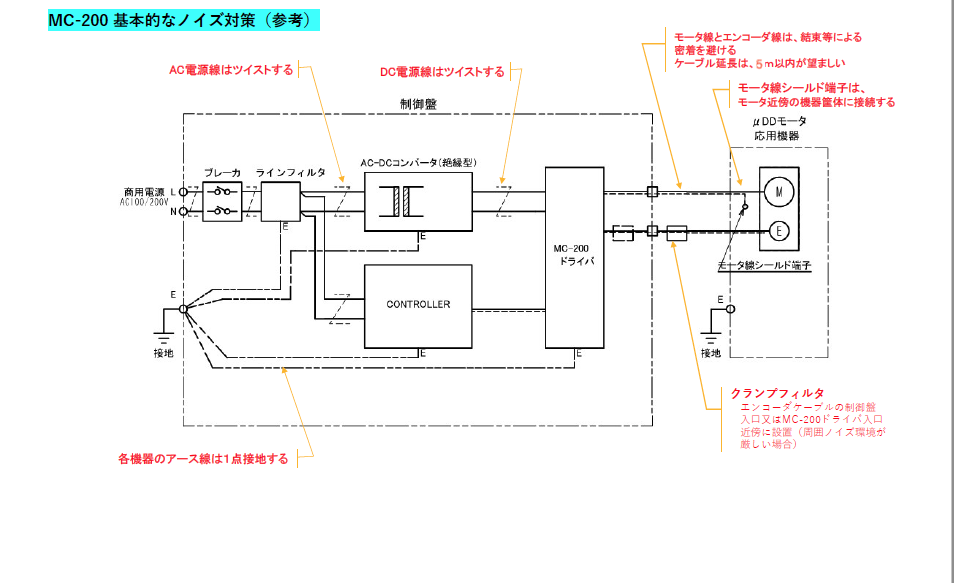
① モータと制御盤のFG線を接続。FG接地は、モータもしくは制御盤の片方のみ実施。
② モータと制御盤のFG線は非接続。FG接地は、モータ及び制御盤の両方実施。
(モータと制御盤のFG線を接続し、両方のFGを接地された場合、アースループができてしまうと考えられる為。)
サーボドライバの仕様につきまして
- 電源の容量はどの程度必要でしょうか?
-
基本的にはモータ定格電流値×電源電圧にてご選定ください。
例えばMDH-4018-324KEの場合、2.3Arms×48V=110Wとなります。
しかしながら、ずっと定格を出す用途は少ないと思いますので、連続実効負荷率を計算の上ご選定ください。
お困りの際は以下お問い合わせフォームよりお問い合わせください。
お問い合わせフォーム
- ドライバの上位はどのように選定したら良いですか?
-
I/Oポート(ドライバCN4)からパルス指令(ラインドライバ)、アナログ電流指令(0V±5V)が可能です。
エンコーダフィードバックはINC(ABZ相※差動)、ABS(RS-422ASCII、バイナリー)で取得可能です。
また、USB、SPI通信でのコマンド指令が可能です。
- CN1(電源)コネクタのピン配置を教えてください。
-
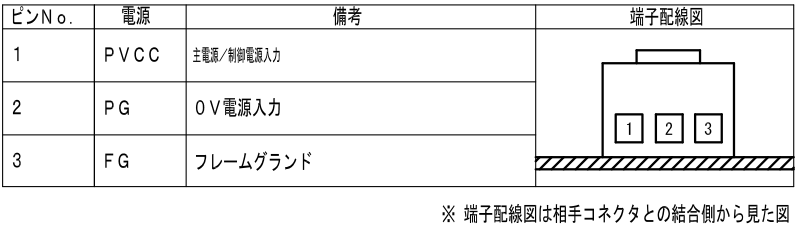
- MC-200-7220Aを使用していますが、上位PLCから指令を与えるときの設定方法を教えてください。(位置制御)
-
MTLParamのparameterタブで以下パラメータを変更してください。
#100 動作モード 初期値0→30(位置制御、外部指令)
#101 上位インターフェース設定 初期値0→1(デジタルIO)
※上記パラメータは転送→保存後に電源のOFF/ONで有効となります。
お困りの際は以下お問い合わせフォームよりお問い合わせください。
お問い合わせフォーム
- MC-200-7220Aを使用していますが、上位PLCから位置指令パルスの方式教えてください。
-
パラメータ#300番にて設定致します。
0:パルス列・符号信号形式(PLS・DIR)
⇒希望動作のパルス信号と回転方向のON/OFF信号(CWは1、CCWは0)を入力します。
1:CW・CCW 信号形式
⇒動作させたい回転方向のピンに希望動作のパルスを入力します。
2:2 相(90°位相差)信号形式
⇒2相の希望動作パルスを90°位相差により回転方向と動作を指示します。
- MC-200-7220Aに入力可能なパルス信号の最大周波数は何Hzでしょうか?
-
単相2.5MHzとなります。
- エンコーダ信号を取得することは可能ですか?モータに付いているエンコーダはインクリメンタルです。
-
可能です。弊社ドライバMCシリーズでは2つの取得方法がございます。
① USB接続にてエンコーダ値を読み取る方法。
無料アプリMTLparamを用いてPC上に表示できます。
※$Eから返信まで20~50msecの遅延がございます。
② ドライバ出力CN4(pin23~28)からABZ相を出力しております。
こちらはドライバ内部で信号を分岐しておりますので、低遅延でエンコーダ信号を取得可能です。
- アブソリュートタイプのモータをMC-200-7220Aと接続したときのドライバからの位置情報の出力について教えてください。
-
位置情報はCN4コネクタの27pin、28pinから出力されます。
出力はRS422の差動で①ASCIIコード、②バイナリコードから選択してください。
また、MTLPramのPrameterタブから以下パラメータを変更してください。
#316 エンコーダ位置出力モード ASCIIコード:0、バイナリーコード:1
※本パラメータは転送→保存後に電源OFF/ONで有効となります。
お困りの際は以下お問い合わせフォームよりお問い合わせください。
お問い合わせフォーム
- 供給電源が48VのモータをMC-200で駆動する場合、24V電源を使用して駆動するとモータスペックはどうなりますか?
-
例えば、MDH-7018の場合、瞬時最大トルク、連続ストールトルクが約70%減となります。
動作条件や負荷状況にもよりますが、可能な限り48V電源でのご利用をおすすめ致します。
各シリーズのトルク特性図はこちらよりダウンロードいただけます。
お困りの際は以下お問い合わせフォームよりお問い合わせください。
お問い合わせフォーム
- MDH-6018を24V電源を使用して駆動するとモータスペックはどうなりますか?
-
下記資料ご参照ください。ご使用する負荷にもよりますが、瞬時最大(1秒)では約7Aほど必要です。 定格電流はカタログ値である3.2Armsですので、 瞬時最大トルクを多くご使用する場合は、24V×7A=168W以上、 定格内でのご使用の場合には、24V×4.5A=108W以上、 上記が電源容量の目安です。
MDH60トルク資料こちらよりダウンロードいただけます。
お困りの際は以下お問い合わせフォームよりお問い合わせください。
お問い合わせフォーム
- μDDモータ+MC-200の消費電流はいくつでしょうか?
-
モータ電流は型式・使用条件によって変わっていきます。
消費電流は主に下記要素が関係します。
① モータ ②エンコーダ ③CPU ④その他(I/Oなどの周辺)
例)主電源48Vのとき、
・サーボOFF時の消費電流は、エンコーダ+CPU+その他=おおよそ150~250mArms程度です
・サーボON時の主要消費電流は、サーボOFF時の電流+モータ駆動電流です。
モータ駆動電流が3Armsのとき、
3Arms×+0.3Arms = 3.3Arms 程度の消費電流となります。
ドライバ単体では動作に使用しているI/Oポートによっても異なりますが、
おおよそ200~400mArms程度です。
お困りの際は以下お問い合わせフォームよりお問い合わせください。
お問い合わせフォーム
- MC-200-7220AのCN4にあるI/F用電源の消費電流はどれくらいでしょうか。
- ドライバの上位から非常停止信号をドライバに対して与えたい時、どの入力を利用するのが推奨されますか。
-
DINに非常/減速停止を設定し、DINに入力する方法を推奨致します。
・非常停止:ドライバ内部でモータの動力線を物理的に切り離す (アラーム出力)
・減速停止:速度制御に切り替えて、速度ゼロ指令を与える
⇒#109内部指令減速度のパラメータに依存して減速停止します。(サーボはON状態)
お困りの際は以下お問い合わせフォームよりお問い合わせください。
お問い合わせフォーム
- モータをサーボOFF時に手動でも動かしたい。そのとき、エンコーダは手動で回した分も読み取り、PCに移動量を表示させることはできますか?
-
ドライバよりエンコーダ値が出力されておりますので、I/OかUSBにて取得可能です。
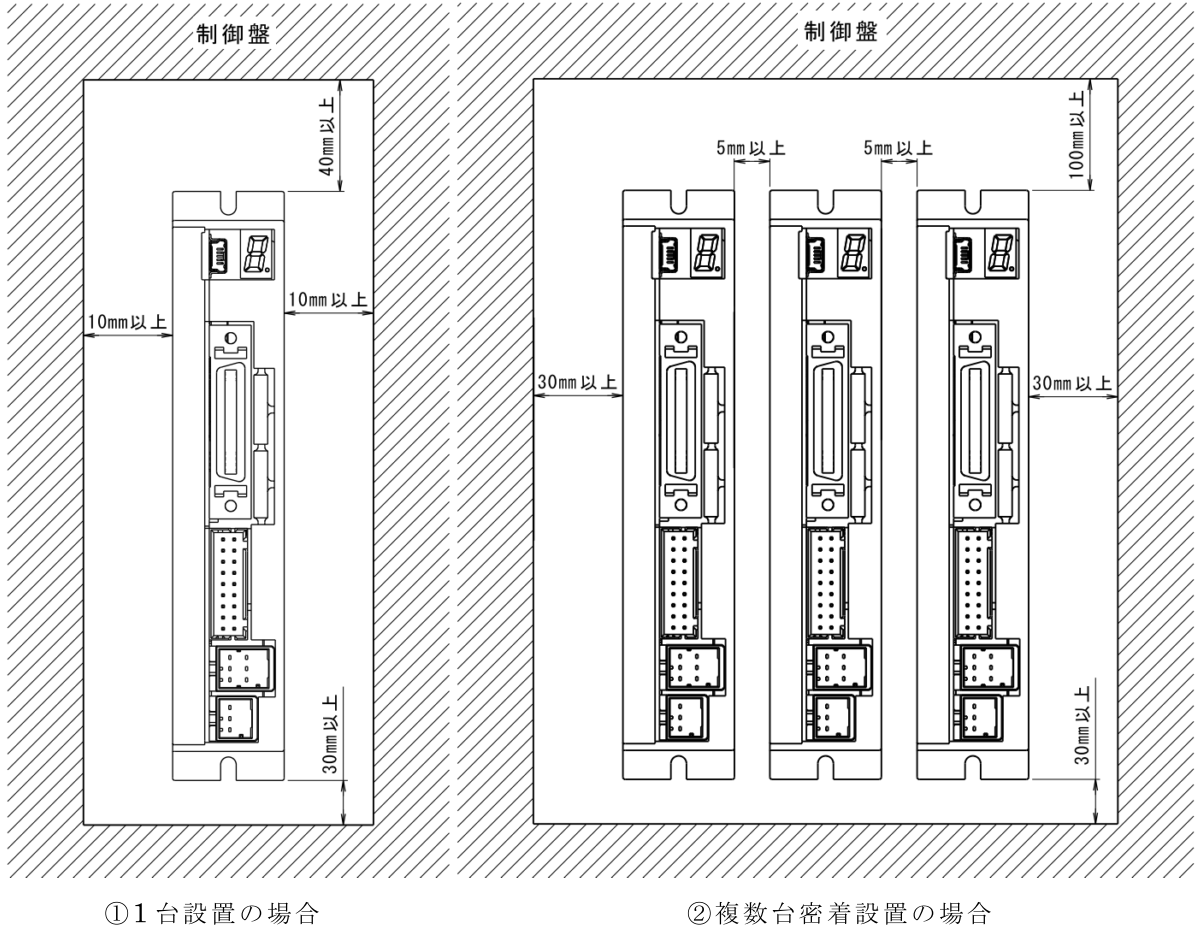
- 制御盤内のドライバの設置環境において注意点はありますか?
-
距離は図の通りに設置ください。
冷却のファンを設置するなどして、制御盤内の温度が高くなり過ぎないようにしてください。
ドライバを図のように立てて設置する場合は、CN1(電源)のコネクタが下側になるように設置してください。
- モータにかかっている力の計測はどのようにするのでしょうか?
-
モータの実効電流値をフィードバックすることで可能です。それにモータのトルク定数をかけるとトルク値へ変換できます。
MC-200-7220:USB経由
MC-200-7220A:USB経由、CN4 アナログモニタ出力(2.5V±2.5Vで出力。スケールはパラメータ#315で変更)
MC-200-7220D:USB経由、SPI通信経由(IEEE754単精度)
- 原点復帰の手順について教えてください。
-
ここでは、モータエンコーダのZ相(原点信号)を利用した方法についてご紹介いたします。
①MC-200の外部接続コネクタCN4のpin8~pin11のいずれかに原点復帰用パルスを入力します。(例えば、pin8のDIN1を利用することにします)
②MTLParam上で、
「#100 動作モード」の設定値を「30」に変更
「#101 上位インターフェース設定」の設定値を「1」に変更
「#102 原点復帰動作モード」の設定をCW方向に原点復帰する場合は「1」、CCW方向に原点復帰する場合は「10001」に変更
「#107 原点復帰速度」を任意の数値に変更する
「#304 外部入力DIN1モード選択」の設定値を「3」に変更もしくは、ドロップダウンリストから「HOME:原点復帰」→確定→転送を実行してください。 ※本パラメータは保存後、電源OFF/ONで有効です。
③サーボONの状態で、CN4のpin8へパルスを入力してください。(アクティブLow、50ms以上)
④「#102 原点復帰動作モード」「#107 原点復帰速度」に応じてモータが回転し、Z相を検出すると停止、カウントクリアします。
- MC-200はフィールドネットワークに対応していますか?
-
今のところ、フィールドネットワークには非対応となります。
以下、ネットワークの対応に向けて準備中です。
・EtherCAT
・MECHATROLINKⅢ
※対応時期は未定
なお、三菱電機社(SSCNET III/H)、パナソニック社(EtherCAT、R-TEX)のサーボアンプにてネットワーク対応が可能です。
詳しくはこちら
- USB通信を利用して、位置や速度を指令することは可能ですか
-
可能です。
下記USBのプロトコルで、CN5よりコマンド制御が可能です。
通信速度:9600、19200、38400、57600bps※初期値は59400
bit長:8bit
パリティ:なし
ストップbit:1bit
フロー制御:なし
なお、初期設定やパラメータ設定は専用ソフトウェアMTLParamのご利用を推奨いたします。
コマンド一覧はコマンドマニュアルをご用意しております。
こちらからダウンロード(要ユーザ登録)
- USB通信を利用して、モータの電流値を取得することは可能でしょうか?
-
可能です。
取得方法と致しましては、下記2通りとなります。
① コマンド「$Ecur」
モータ電流値を取得する単体コマンドです。
データは10進数値 (アスキーコード) にて、取得されます。
ドライバからの取得データの単位は [mA] です (取得値÷√2と算出して頂くことで [mArms] の値となります)。
② コマンド「$G+」 (MC-200-7220コマンドマニュアル 5ページ目参照)
ドライバからグラフデータ出力を開始する為のコマンドです。
データは、「位置」や「速度」「電流」などの複数の内容がカンマ区切りの16進数値 (アスキーコード) にて、絶え間なくドライバから出力され続けます。
パラメータ#902にて、モータ電流値を選択して頂くことで、グラフデータの1つにモータ電流値が含まれます。
こちらも単位は [mA] になります。
(グラフデータを停止させる場合は、コマンド「$G*」の送信が必要です。)
データの取得を高速で行いたい場合は、②のほうが有効的です。
但し、②は「複数のデータからモータ電流値を抜出し」「16進数から数値変換」などの処理が必要となり、①より難易度が高いです。
コマンド一覧はコマンドマニュアルをご用意しております。
こちらからダウンロード(要ユーザ登録)
- MC-200CのCN4の詳細な電気的仕様を知りたいです。
-
詳細は製品仕様書「MC-200C-6018□」の16ページ目をご参照ください。
・各ピン(SVON~SPICLK)は5VでCMOSとなります。
・D5VとD3R3Vは上位電源電圧用で入力などは不要です。
仕様書ダウンロードはこちら
※お手数ですが会員登録が必要です。
ドライブ能力につきましては
IoH(mA)= -5mA (1端子あたり)
IoL(mA)= = 5mA (1端子あたり)
※保証する数値ではありません
- CN4のコマンド入力はシンク入力、ソース入力のどちらでしょうか? また、何Vの信号を入力すれば良いでしょうか?
-
ドライバ側から見た場合は「吐き出し」 → 「ソース」
外部装置側から見た場合は「吸い込み」 → 「シンク」
・D5VとD3R3Vは上位電源電圧用で入力などは不要です。
となります。
Pin.5「IF+V」にVCCをご接続頂き、Pin.6~11の接続状態を下記のように切替えて頂くことにより、 コマンドのON/OFFを切替えることが可能です。
Pin.5「IF+V」にご接続頂くVCC範囲は、5~24Vになります。
・Pin.6~11 = オープン(非接続) : 非アクティブ(OFF)
・Pin.6~11 = GND接続 : アクティブ(ON)
ドライバのエラーにつきまして
- ファームウェアアップデートに失敗した。
-
こちら資料ご参照ください。
ファームアップデート資料
- 7セグ表示「2」点滅:エンコーダエラーアラームが発生する。
-
エンコーダ線の何れかがコネクタから外れている可能性がございます。配線の点検をお願いします。修理ご希望の場合はお気軽に申し付けください。
お問い合わせフォーム
- 7セグ表示「5」点滅:サーボONにすると、速度超過アラームが発生する。
-
初期設定のエンコーダ分解能が異なっている可能性が高いです。 ソフト画面左上の「COM」より「Model設定画面移行」にチェック頂き、 モータ型式と分解能とエンコーダ種類をご確認ください。画面中央部の「型式」がモータ本体銘鈑と合っていればOKです。 「MTLParam アプリケーションマニュアル_ver2.0」の6ページ目に初期設定の記述がございますのでご参照ください。 マニュアルダウンロードはこちらから
- 7セグ表示「6」点滅:過電流エラーアラームが発生する。
-
ドライバ出力電流が、瞬時最大か定格電流以上出力されております。
ご使用の負荷と動作がモータに対して大きいことが考えられます。
負荷や動作の再設定、取付精度の確認及び、モータ・ドライバの変更(容量アップ)をご検討ください。
お問い合わせフォーム
- 7セグ表示「7」点滅:位置偏差過大アラームが発生する。
- 7セグ表示「A」点滅:低電圧エラーアラームが発生する。
-
お使いの電源電圧の容量不足の可能性が高いです。
特に電源の出力電流をご確認のうえ、ご選定願います。
容量選定については本FAQページ:サーボドライバの仕様につきまして「電源の容量はどの程度必要でしょうか?」をご参照ください。
- 7セグ表示「D」点滅:電子サーマルアラームが発生する。
-
ドライバ出力電流が、パラメータNo.401~405の値以上以上出力されております。
ご使用の負荷と動作がモータに対して大きいことが考えられます。
初期値は70~80%にて設定しておりますが、動作サイクルや冷却環境によっては拡大可能です。
ただしモータ損傷に大きくかかわりますので、変更前に一度ご相談ください。
お問い合わせフォーム
- 7セグ表示「3」:カウンタオーバーフローが発生する。
-
カウントの累積値が±32bit(±2,147,483,647パルス)範囲以上となっております。
カウンタリセットにて復帰可能です。
速度制御モードにすると本アラームは発生しません。
専用ソフト「MTLParam」につきまして
- COMが認識されません。
-
①対応OSはWindows10 32bit/64bitとなります。(MAC OSやWindows7は不可です。)
②「COM」のポート番号を変更して認識し直してください。
③「ボーレート」を変更して認識し直してください。(初期値は38400です。)
④USBケーブルの長さの確認をお願いします。(規格は5m以内です。)
⑤上記以外の場合は故障の場合がございますので、お問い合わせください。
お問い合わせフォーム
- USBドライバのインストールはどのように行えばいいですか?
-
セキュリティソフトなどの関係でドライバのインストールがご必要かもしれません。下記サイトをご参照ください。
「FTDI ドライバインストールサイト」
※2024/12より、FTDI chip社のドライバダウンロードページにアクセスできない現象が確認されています。
アクセスできない場合はFTDI Chips社にお問い合わせいただくか、弊社にお問い合わせください。 参考「FTDIのUSBシリアル変換器のドライバのインストール法」
- MODEL設定画面のエンコーダ値は4逓倍後を入力するのでしょうか?
-
4逓倍前のエンコーダ分解能を入力致します。例えばMDH-3018-108KEの場合、108,000パルスと入力ください。画面中央部の「型式」が接続するモータの型式と一致していればOKです。
- グラフの波形サンプリング時間の推奨を教えてください。
-
50~100msです。
「status」や「program」など不必要な項目は閉じてご利用ください。速く設定し過ぎると、実時間と異なる場合がございますのでご注意ください。
- 電流制御ループのゲイン調整を行いたいのですが、推奨されるゲイン調整方法等はありますでしょうか。
-
MC-200-7220Aの場合、ドライバのCN4コネクタから実行電流値のアナログモニタが可能です。
(デフォルトでは22pinに割り当てられています)
上位の指令電流値と実効電流値との応答性を以下2つのパラメータにより調整してください。
#200 第1電流制御 比例ゲイン(P) [mV/A]
#201 第2電流制御 積分ゲイン(I)[mV/A・s]
なお、上位コントローラから電流指令をする場合は、以下パラメータの設定もご確認ください。
#100 動作モード 初期値0→32
#101 上位インターフェース設定 初期値0→1
- CONTROLでサーボON状態なのにHOMEボタンやPOSITIONボタンを押してもモータが動きません。何が問題でしょうか。
-
○使用方法につきましては MTLParamアプリケーションマニュアル12ページ目をご覧ください。
・制御方法が内部指令、位置制御に設定されているかご確認ください。
・指令御エラーが出る場合、モータMODEL設定が異なっており場合がございますので、アプリ画面上部「COM」より再度「MODEL設定画面移行」にて型式設定をお願い致します。
解決しない場合はお問い合わせください。
お問い合わせフォーム
購入方法につきまして
- 最小ロット、納期を教えてください。
-
1台からの販売が可能です。
受注生産品となりますので通常受注後1ヶ月ほどかかりますが、在庫がある場合もございますのでお問い合わせください。
- μDDモータを購入したいが、購入方法を教えてください。
-
μDDモータを購入するには以下の2つの方法がございます。
1.掛け払い まずは弊社宛にFAXかメールにてお見積もり依頼をお送りください。営業担当者より折り返し回答させていただきます。
2.代理店から 各地域により代理店が異なります。サポートを含めた対応をさせていただきます。
詳細は問い合わせフォームよりお問い合わせください。
お問い合わせフォーム
サポート・デモ等につきまして
- 貸出機はありますか?
-
ございます。
機種によっては生産が必要ですので、ご相談ください。
なお、貸出期間は3週間以内となります。
- 製品仕様書や取扱説明書を入手したいのですが?
-
機種ごとにご用意しておりますので、以下問い合わせフォームよりお問い合わせください。
お問い合わせフォーム
- μDDモータを組込んだ装置を海外へ輸出したいが、該非判定書は発行可能でしょうか。
- CEマーク対応品はありますか?
-
μDDモータ全機種対応品です。
現状製品にマーキングはされておりませんが、適合宣言書の発行が可能です。ご希望の方はお問い合わせください。なお、発行には1週間ほどかかりますので、余裕あるご依頼をいただけますようお願い申し上げます。
お問い合わせフォーム
- μDDモータの実機動作を見たいのですが、実演していただくことは可能でしょうか。
-
弊社「中町開発センター」にショールームを開設しています。
来社・デモ機のご予約からご連絡ください。
また、ポータブルタイプのデモ機がありますので、貴社事業所内での実演をご希望の場合は弊社営業担当へ直接ご連絡いただくか、お問い合わせフォームから、お問い合わせください。
- 海外での現地サポートは対応してもらえますか?
-
弊社製品を海外に輸出された際のサポート体制については以下の通りです。
・製品の調査をご希望の場合は、製品単体を弊社にご送付いただき、調査・解析を実施します。
(※海外現地への出張サポートは致しかねます。)
また、弊社製品を海外に輸出されるご予定がある場合は、予め以下内容をご連絡頂けますようお願い致します。
・向け先国
・エンドユーザー名
・ご使用用途(装置名)
弊社製品を海外に輸出される場合は、国内において十分に評価されるよう、お願い致します。
非該当証明書の発行をご希望の方は こちらから
他社とのコラボレーションにつきまして
三菱電機
- 三菱電機J4アンプとの接続は可能でしょうか?
-
可能です。
三菱電機J4コラボレーションカタログにて詳細ご確認ください。
- AC200Vの「MR-J4-〇〇A」「MR-J4-〇〇B」との接続は可能でしょうか?
-
可能です。(耐圧の関係でMD20シリーズは不可です)
三菱電機J4コラボレーションカタログにて詳細ご確認ください。
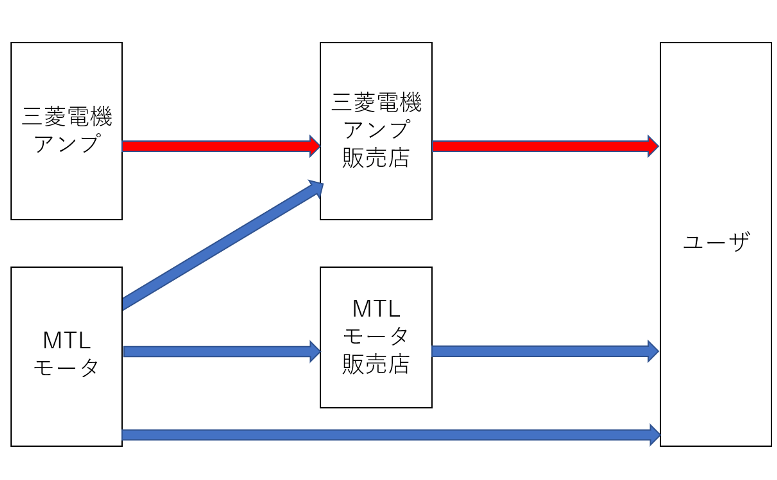
- 今使用中の「MR-J4-〇〇A」「MR-J4-〇〇B」をμDDモータに接続できますか?
-
接続できません。μDDモータの駆動にはパートナーメーカー専用アンプ「MR-J4-〇〇A-J001」「MR-J4-〇〇B-J001」が必要です。
三菱電機J4コラボレーションカタログにて詳細ご確認ください。
- CC-Link IE対応アンプをμDDモータに接続できますか?
-
接続できません。SSC-NETⅢ対応アンプのみコラボ可能です。
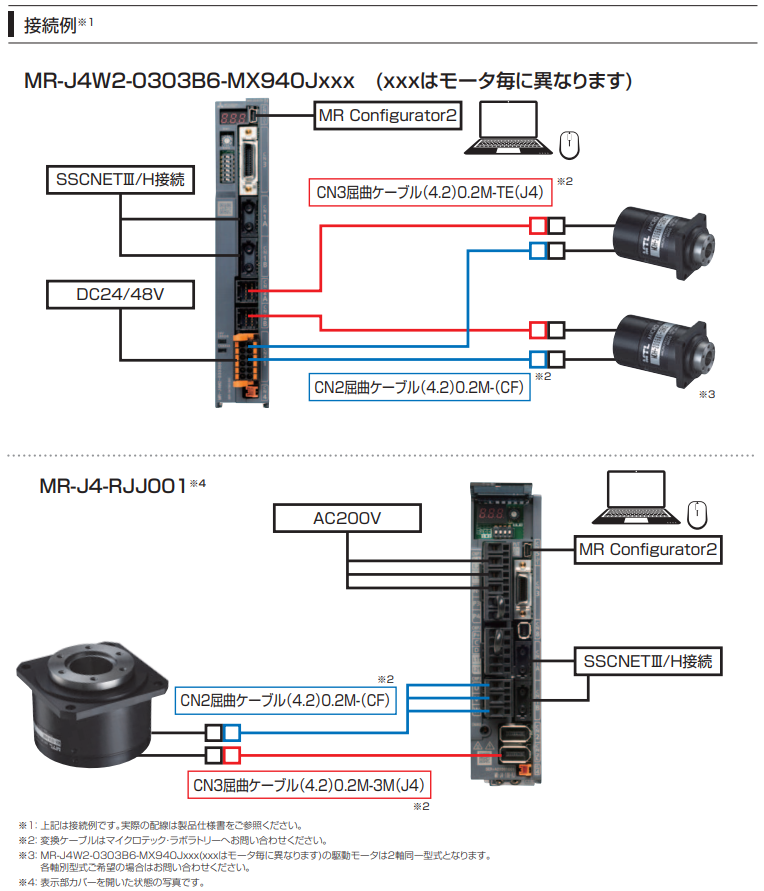
- μDDモータとJ4アンプとの接続コネクタケーブルは購入できますか?
-
可能です。下図のように変換コネクタケーブルを用意しております。
μDDモータとアンプ間の長さ調整はMTL標準延長ケーブルをご利用ください。
三菱電機J4コラボレーションカタログにて詳細ご確認ください。
- コラボ用のJ4アンプの製品仕様書はありますか?
- AC200Vコラボアンプの「MR-J4-〇〇A-J001」「MR-J4-〇〇B-J001」のモータ諸元設定ファイル(mmdファイル)はどこから入手できますか?
- どのようにモータとアンプを購入すればよいでしょうか?
- トラブル時にはどのようにしたらよいでしょうか?
-
まず、ユーザにて一次診断(外観検査、アラームからの診断、製品交換調査など)を行って頂きます。
モータや組み合わせが起因してそうな場合は弊社、アンプが起因してそうな場合はアンプメーカにお問い合わせください。
お問い合わせフォーム
- アンプ容量を落としての使用は可能でしょうか?
- 推奨イナーシャ比はありますか?
-
基本的に50倍です。チューニングによりそれ以上も可能です。
パナソニック
- パナソニックアンプとの接続は可能でしょうか?
-
可能です。
パナソニックコラボレーションカタログにて詳細ご確認ください。
- AC200Vの「A6L」との接続は可能でしょうか?
-
可能です。(耐圧の関係でMD13、20シリーズは不可です)
パナソニックコラボレーションカタログにて詳細ご確認ください。
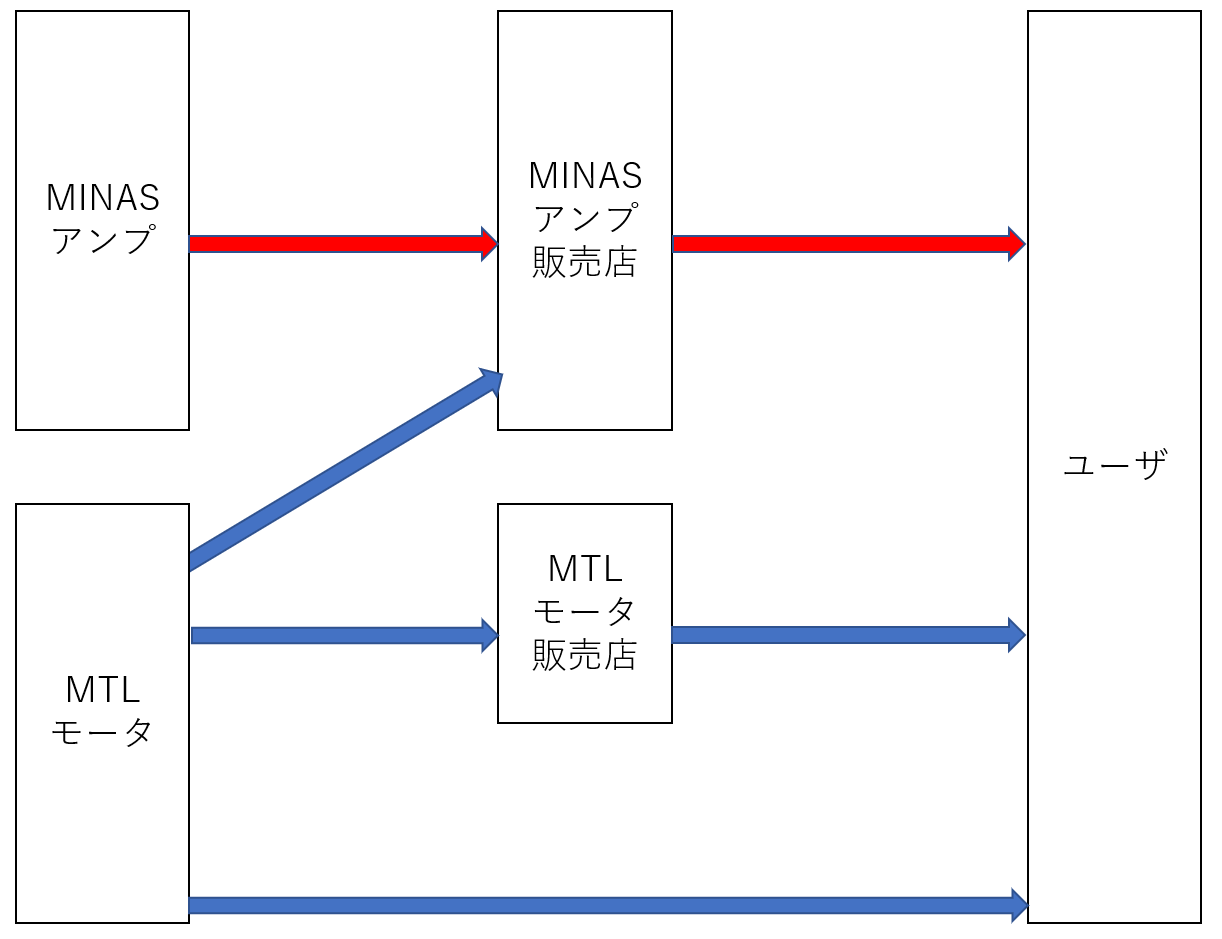
- 今使用中のMINAアンプをμDDモータに接続できますか?
-
アンプ型式によります。(リニアモータ対応アンプなど)
新規ご購入をおすすめ致しますが、詳細はお問い合わせください。 お問い合わせフォーム
- μDDモータとMINASアンプとの接続コネクタケーブルは購入できますか?
-
弊社より可能です。変換コネクタケーブルを用意しております。
0.2mですので、μDDモータとアンプ間の長さ調整はMTL標準延長ケーブルをご利用ください。
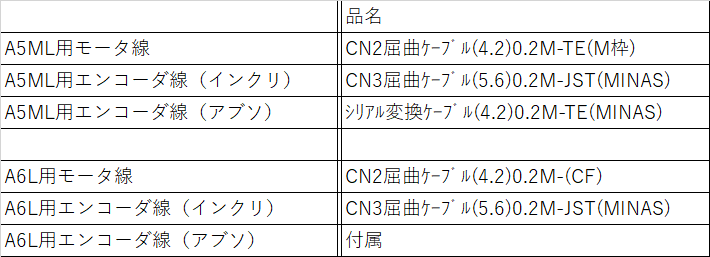
- アブソリュートエンコーダのμDDモータとの接続は可能でしょうか?
-
可能です。エンコーダとアンプの間に「MFC-10P」変換基板BOXが必要です。
こちらも弊社より購入可能です。A6Lシリーズのみ対応可です。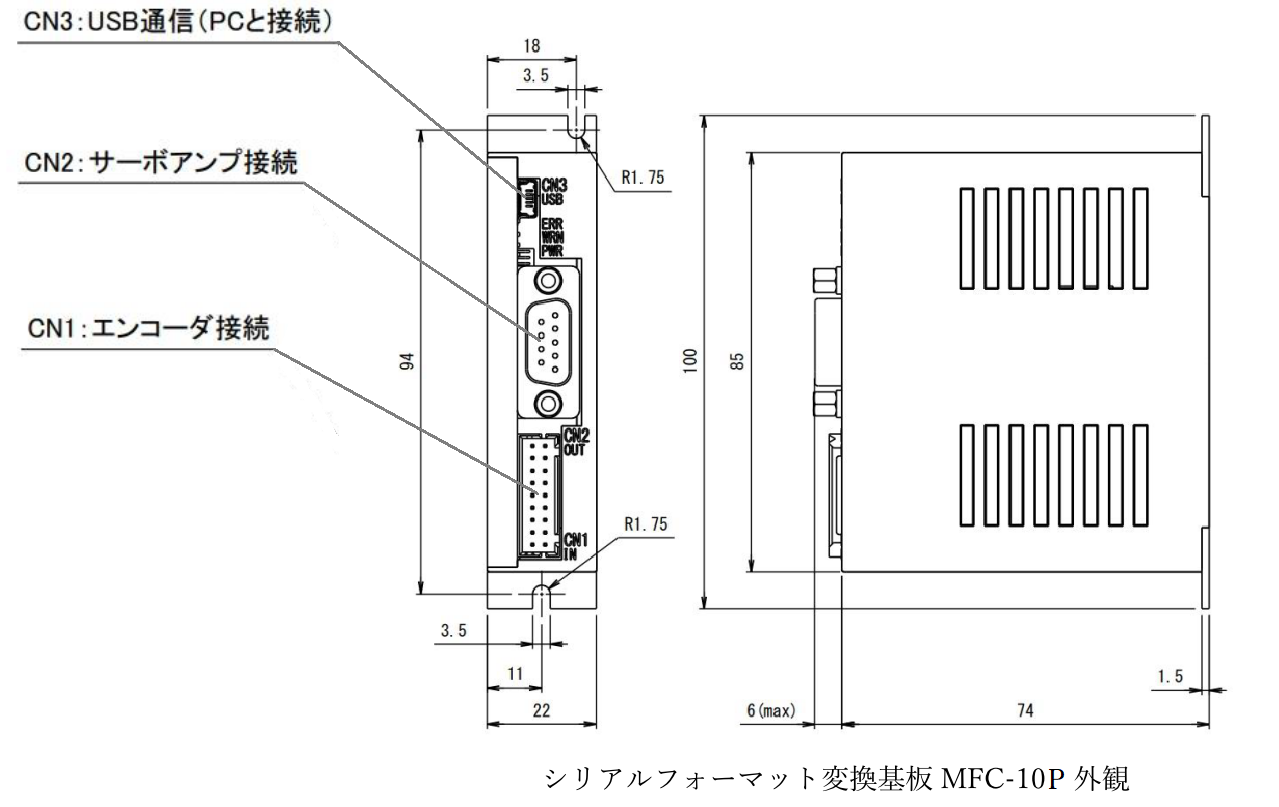
- EtherCAT対応アンプをμDDモータに接続できますか?
-
「A6BL」にて接続可能です。パナソニックコラボレーションカタログ25ページにて詳細ご確認ください。
- どのようにモータとアンプを購入すればよいでしょうか?
- トラブル時にはどのようにしたらよいでしょうか?
-
まず、ユーザにて一次診断(外観検査、アラームからの診断、製品交換調査など)を行って頂きます。
モータや組み合わせが起因してそうな場合は弊社、アンプが起因してそうな場合はアンプメーカにお問い合わせください。
お問い合わせフォーム
カスタマイズにつきまして
- カスタマイズをお願いしたいのですが、対応いただけますか?
-
ご要望の仕様を弊社までお問い合わせください。
内容によって対応の可否を検討させていただきます。
可能な場合は製作費用、納期、仕様書の取り交わしを進めさせていただきます。
<主なカスタム例> ■エンコーダ分解能変更 ■中空軸内タップ加工 ■低発塵仕様
■中空軸拡大 ■ケーブル長・コネクタ変更 ■モータケースフランジレス構造
■出力軸構造変更(ピニオンギヤ化、位置決めピン追加、ローレット加工、アルミアルマイト化など)
カスタム事例ページ
マスタースレーブにつきまして
- マスタースレーブとはなんですか?
製品のお問い合わせはこちら
042-746-0123
受付 / 平日9:00~17:30

