目次
1.マスター・スレーブ(リードフォロワー)制御とは?2.長所
3.どんなところで使われているの?
4.バイラテラルとは?
5.何ができる?
6.マスタースレーブ(リードフォロワー)システム構成例
7.シンプルな構成で反力検出を有するマスタースレーブ(リードフォロワー) を構築可能な理由とは?
8.最後に
マスタ・スレーブ(リードフォロワー)制御とは
「マスター」機と、マスター機の一方的な制御下で動作する「スレーブ」機に役割を分担する方式のこと。(Wikipedia)
長所
(バイラテラル制御機能を付与することで、直感性が更に高まります。)
どんなところで使われてるの?
例1 高枝切り鋏(機械式マスタースレーブ)
切った感触を操作者が感じられるので「反力フィードバックあり」例2 マウス(ポインティングデバイス)
マウスはマスタ、ポインタはスレーブポインタが画面端にぶつかってもマウスでは感じられないので「反力フィードバックなし」
例3 手術支援ロボット「ダヴィンチ」
マスタースレーブの応用例。医師がマスターを操作し、スレーブがそれに従い手術します。
従来の手術では視野と施術範囲の確保から必要なだけ切開されていましたが、
視野は内視鏡で確保し、更にダヴィンチのスレーブは人間の手よりも細く長く設計されています。
そのため必要な切開範囲が少なくなります。
(従来は手術できなかった箇所が手術可能にもなりました。)
ダヴィンチのメリット
低侵襲・術中の出血量が少ない・傷口が小さい・術後の疼痛がすくない・回復が早い・機能の温存が向上
例4 リアルハプティクス義手
マスターはフットペダル、踏み込み量に応じてスレーブ(義手)が動作します。義手で触れた力触覚がフットペダルにフィードバックされることで手加減することができます。
バイラテラルとは?
これにより操縦者がより直感的に操縦できるようになります。
ロボットと操縦者との感覚系・運動系の結合をさらに密にしていく方向で(テレイグジスタンス・テレプレゼンス)
究極的には操縦者自身がロボットに成り代わって作業できるようになります。
何ができる?
遠隔操作
テレオペレーション
電気的にマスターとスレーブが接続されていれば良いので、有線だけでなく無線接続でも動作します。距離に比例して遅延が発生しますが、通信速度の向上により遅延は改善される方向です。
5Gの普及が楽しみです。
動作の拡大、縮小
スケールドテレオペレーション/マイクロマニピュレーション
人間で直接扱えないようなミクロンオーダーの繊細な作業や、何トンもの重量物をマスタ・スレーブシステムを介して行うことができます。マスタースレーブ システム構成例
学生が製作した反力フィードバックを有するマスタースレーブ ハンド
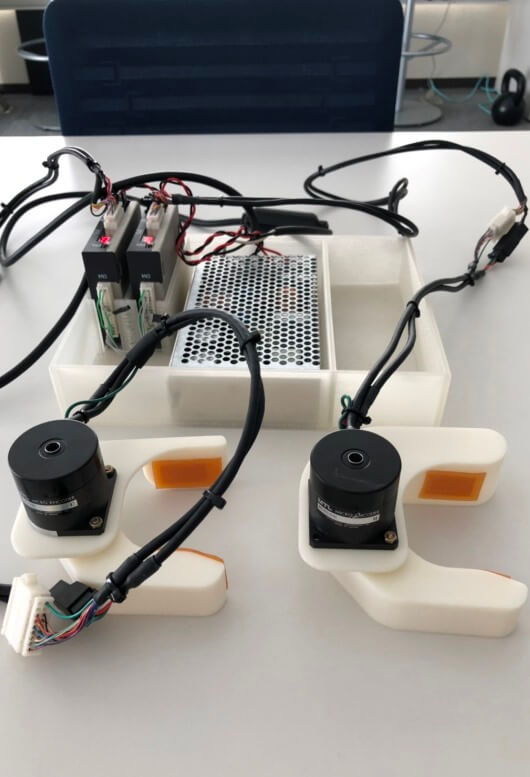
使用部品
①μDDモータ:MDH-4018-324KE ×2
②専用ドライバ:MC-110-4810 ×2
③マスタースレーブ 用ケーブル ×1
④電源48V ×1
⑤ハンドパーツ(3Dプリンタで製作)
組み立て手順
(1)モータとドライバをコネクタ接続する。 マスター用、スレーブ用の2セット
(2)ドライバ間をマスタースレーブ用ケーブルで接続する。
(3)電源を供給し、マスタースレーブ 可能が可能。
(4)ゲイン調整(位置決め精度や反力フィードバックを最適化するためのチューニング)
シンプルな構成で反力検出を有するマスタースレーブ を構築可能な理由とは?
良好なバックドライバビリティ
外力により生じる出力関節の回転の度合いを示すもので、動力伝達機構や原則秘湯により変化する。一般に産業用ロボット・マニピュレータのようにこう減速比のギヤを用いると出力関節に現れる摩擦力や
慣性力が大きくなり、バックドライバビリティは悪化する。
高減速比ではバックドライバビリティは悪化するが、低減速比になるほどバックドライバビリティは改善する。
高トルク
減速機は主にトルクを増幅する目的で使用しますので、低減速比化したいが、必要トルクに満たない場合は低減速化は叶いません。
高トルクだから減速比を小さくできる。
減速比が小さくなるとバックドライバビリティが向上する。
バックドライバビリティが向上すると、スレーブで受けた触覚を、操縦者が受け取りやすくなる。
最後に
μDDモータは同サイズ比5倍の最大トルク。バックドライバビリティの向上に役立つはずです。
マスタースレーブロボットにご興味ある方をサポート致します!
触って試してみたい!作りたい!こんなものを掴みたい!などのご要望から、ご希望のロボットを試作開発致します!μDDモータを使用したマスタースレーブロボット


リアルハプティクス義手
ユーザ:慶應義塾大学 野崎研究室


細胞培養操作向け遠隔操作システム
ピペットの微細な操作を、触覚フィードバック付きで無線遠隔操作が可能となりました。協働ロボット同士もマスタースレーブ動作をしています。
ユーザ:大成建設株式会社様

身体感覚を伝送する双腕型ロボット:GP-Arm
力触覚や視覚情報を、遠くの自分(ロボット)とリアルタイムで共有します。将来は自分がロボットとなり、位置情報のみならず、力加減や視覚情報をダイレクトティーチングできるようになります。ユーザ:NEDO/慶應義塾大学ハプティクス研究センター
慶應義塾大学野崎研究室

Avatar Fishing -遠隔釣り体験-
東京都⇔大分県にてマスタースレーブ。釣り糸の引張感、リールの巻取り抵抗がリアルタイムで感じることができ、大分名物鯛釣りを東京で体験できます。
釣った鯛は、航空便で翌日には届くサービスを検討中。
ユーザ:株式会社Re-al様
ANAavatarin様
参考資料
参考文献
ROBOTICS ロボティクス 日本機械学会(著者名 一般社団法人 日本機械学会 発表年2011年9月15日 タイトル ROBOTICS ロボティクス)
https://www.jsme.or.jp/
参考リンク
東京医科歯科大学病院 手術支援ロボット「ダヴィンチ」徹底解剖http://hospinfo.tokyo-med.ac.jp/davinci/charm/index.html
日本ロボット学会誌
ロボットとアクチュエータのバックドライバビリティ(岡山大学 鈴森康一氏)
https://www.jstage.jst.go.jp/article/jrsj/31/6/31_31_548/_pdf