「μDDモータ使いたいがSSCNETⅢ/H対応のドライバが無い」
ワークに近い駆動に最適です!
μDDモータの中空軸を活かしたカスタム事例はこちら
アンプ型式・ケーブルオプション・
購入先の3点が決まれば導入可能です!
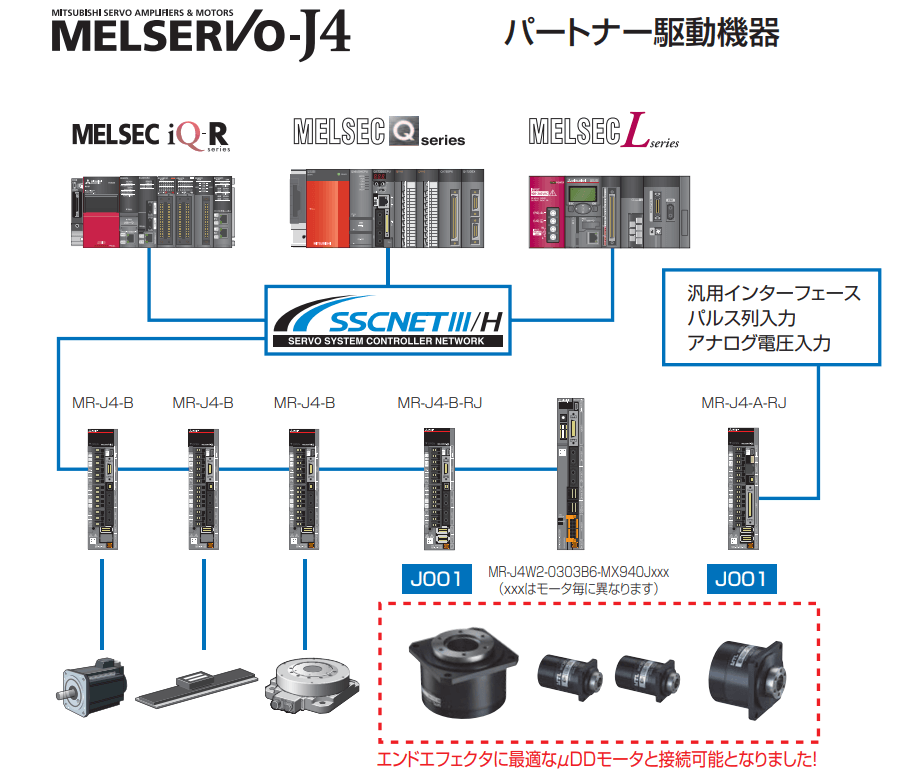
コラボレーションにてご使用できるアンプはAC電源とDC電源の2種あります。
①AC200V電源「MR-J4-○○△-RJJ001 」
◆型式
MR-J4-△〇-RJJ001
△:アンプ用容量
〇:指令インターフェイス
(A:汎用インターフェイス、B:SSCNETⅢ/Hインタフェース)
型式例)
MR-J4-20A-RJJ001 200W 汎用インターフェイス
MR-J4-40B-RJJ001 400W SSCNETⅢ/Hインタフェース
容量と指令インターフェイスにより選択します。
RJJ001はインクリメンタルエンコーダの
コラボレーション専用アンプを表します。
その他仕様は標準品と同じです。三菱電機アンプサイトへ
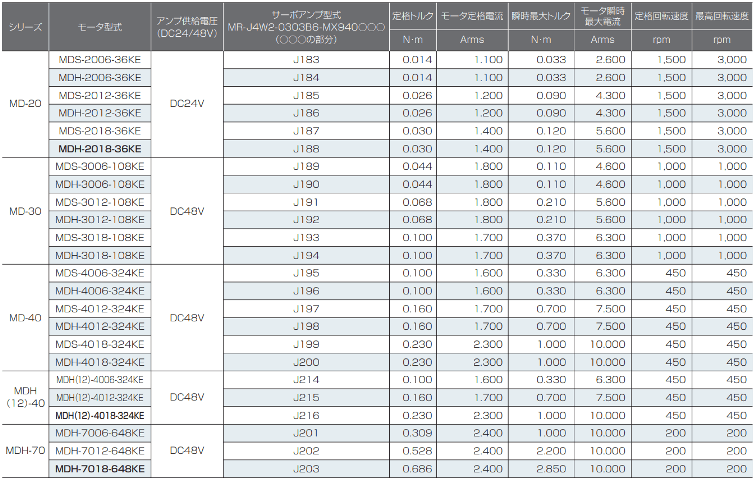
◆型式仕様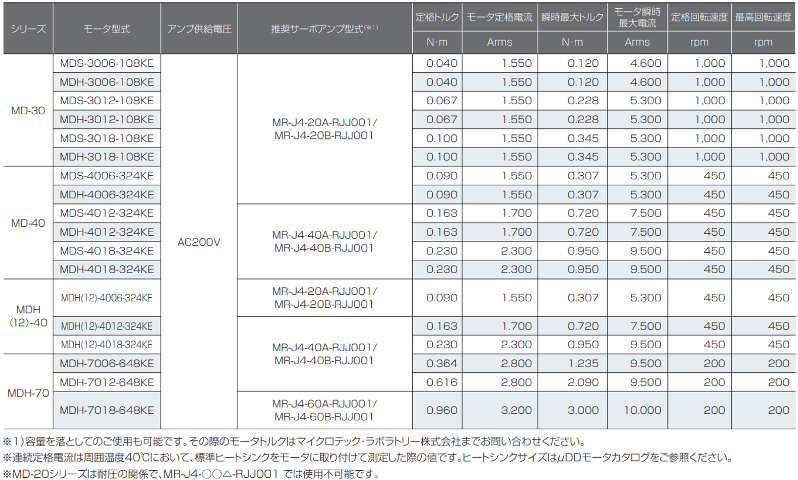
◆ケーブルオプション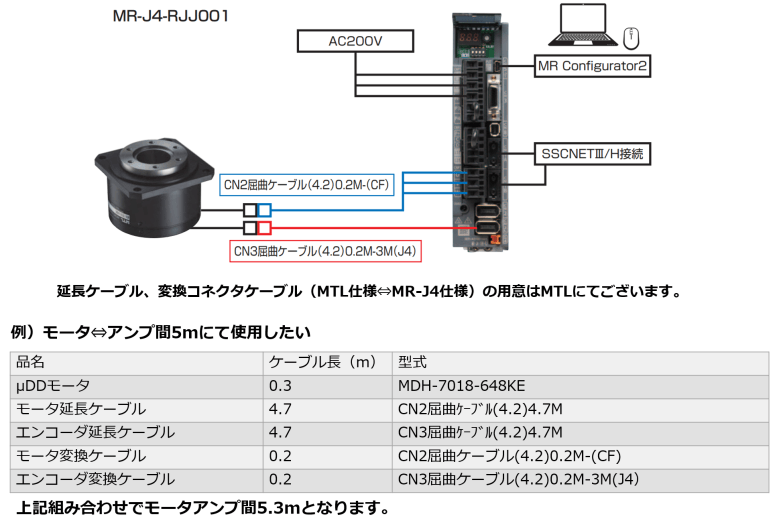
◆立ち上げ手順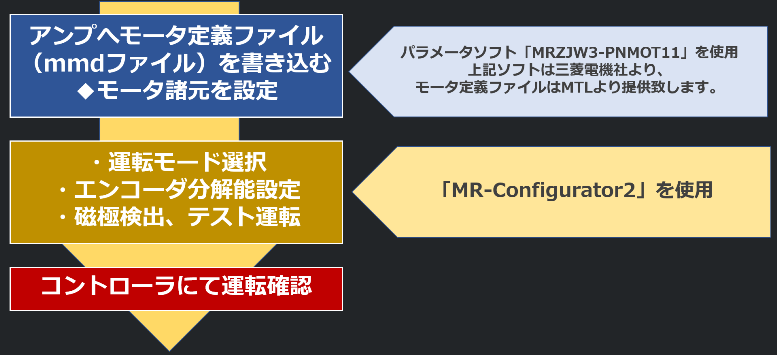
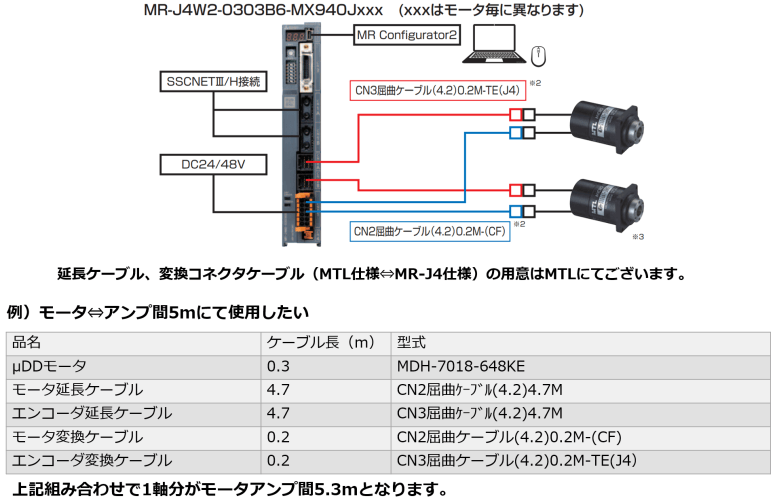
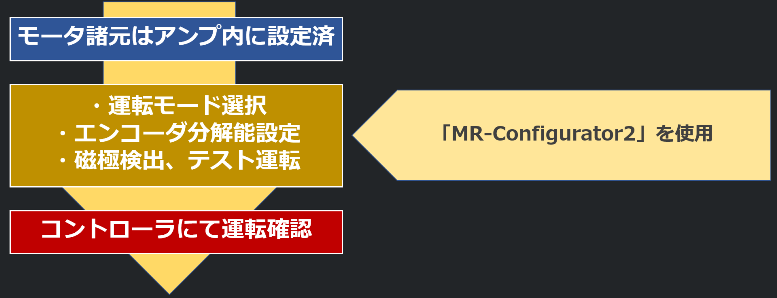
②DC24/48V電源 「MR-J4W2-0303B6-MX940J○○○ 」
◆型式 MR-J4W2-0303B6-MX940J○○○
〇:モータ型式ごとのIDが入ります。
本アンプは2軸1体仕様です。1つのアンプで2台同じ型式のμDDモータの駆動が可能です。
異なるモータを駆動したい場合はお問い合わせください。
その他仕様は標準品と同じです。三菱電機アンプサイトへ
◆型式仕様
◆ケーブルオプション
◆立ち上げ手順
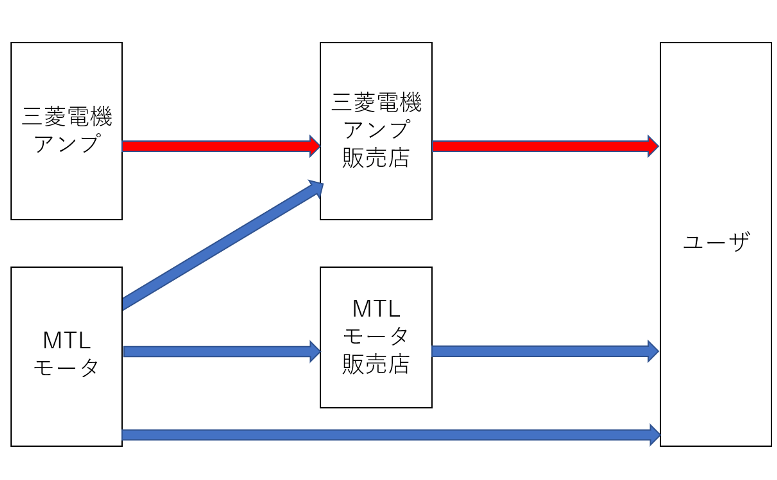
◎入手方法
モータ・アンプそれぞれメーカよりご購入頂きます。
詳細はお問い合わせください。
以上になります!その他情報はQ&Aでも紹介しております!
製品仕様書や組み合わせのご相談はお気軽にお問い合わせください。
コラボカタログがダウンロードできます!
~詳細使用はこちらをご確認ください~
お時間あればこちらもご参照ください!

身体感覚を伝送する双腕型ロボット
「GP-Arm」
ユーザ:NEDO/慶應義塾大学ハプティクス研究センター・野崎研究室

μDDモータ中空軸内タップ加工
MDH-30シリーズの中空軸内にM5×0.8タップを切りました。 このタップを利用してロータリージョイントの接続が可能です。 小型部品搬送のエンドエフェクタや、インデックステーブルのワークの吸い上げ固定+回転駆動にベストです。