小型ダイレクトドライブモータのマイクロテック・ラボラトリー
導入事例 旧
 マスタースレーブ
マスタースレーブ


リアルハプティクス義手
ユーザ:慶應義塾大学 野崎研究室


細胞培養操作向け遠隔操作システム
ユーザ:大成建設株式会社様

身体感覚を伝送する双腕型ロボット
「GP-Arm」
力触覚や視覚情報を、遠くの自分(ロボット)とリアルタイムで共有します。将来は自分がロボットとなり、位置情報のみならず、力加減や視覚情報をダイレクトティーチングできるようになります。ユーザ:NEDO/慶應義塾大学ハプティクス研究センター
慶應義塾大学野崎研究室

Avatar Fishing -遠隔釣り体験-
東京都⇔大分県にてマスタースレーブ。
釣り糸の引張感、リールの巻取り抵抗がリアルタイムで感じることができ、大分名物鯛釣りを東京で体験できます。
釣った鯛は、航空便で翌日には届くサービスを検討中。
ユーザ:株式会社Re-al様
釣り糸の引張感、リールの巻取り抵抗がリアルタイムで感じることができ、大分名物鯛釣りを東京で体験できます。
釣った鯛は、航空便で翌日には届くサービスを検討中。
ユーザ:株式会社Re-al様

触覚を伝送する6軸ユニット
「可触化デバイス」
可触化を再現するユニットとなります。遠隔操作に触覚を付与した制御を行い、微細からダイナミックなフィードバックを得られます。
直感的に触ることが可能となり、遠隔操作やコミュニケーションの更なる可能性を拡げます。
MTL社内デモ機
 ロボット
ロボット

簡単スカラ:ダイレクトティーチング
人間と共存するロボットには「本質的安全」と「直感的で簡単」であることが求められます。μDDモータにて、誰でも簡単に協働作業ができる小型ロボットが開発可能です。MTL社内デモ機です。

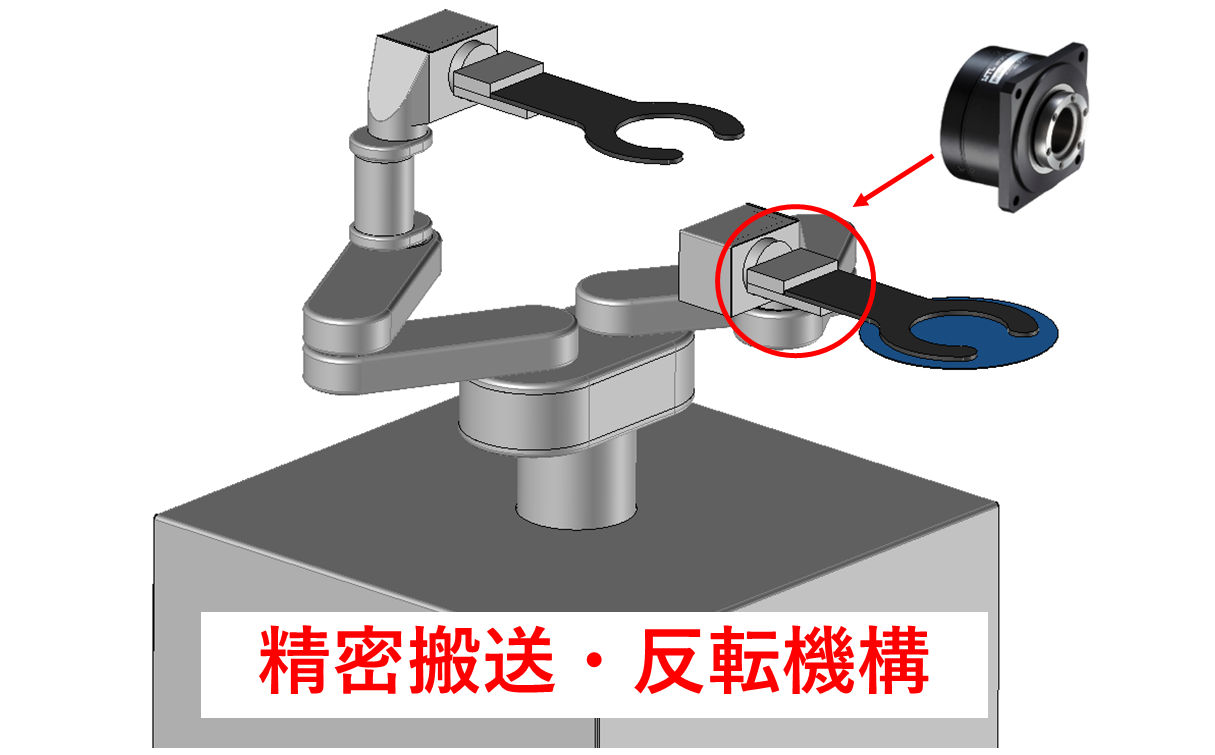
簡単スカラ:繰り返し精度±1μm
簡単に開発できるロボットでも、μDDモータを使用することにより、繰り返し精度±1μmの高精度位置決めスカラが製作可能です。MTL社内デモ機です。

MagLinkage(マグリンケージ)
人間のように、衝撃吸収をしながら高速把持を可能にする新しいアクチュエータです。固い駆動源を、柔らかく制御する従来のロボとは真逆のアプローチをすることにより、今まで実現不可能であった動作が可能となりました。ユーザ:東京大学石川グループ研究室/
大阪大学原田研究室

静かなコミュニケーションロボット
「ウィーーンというモータ音がうるさい。」そんなロボット特有の音が一切しません。睡眠の妨げにもならないので、高齢者のお薬リマインダーや睡眠サポートなども可能です。将来ロボットに必要な要素「静音性」がμDDモータで解決します。
ユーザ:首都大学東京 久保田研究室
 装置・インデックス
装置・インデックス

多軸機構・分割撮像検査装置「JIGEN」
タクトタイム短縮を狙い装置を高速間欠動作させると、装置振動が光学系に影響し高精度な画像検査を行うことが困難になってきます。μDDモータを使用することで、残留振動を抑え高速位置決めを可能としてます。提供:ヴィスコ・テクノロジーズ株式会社様

アクティブジンバル
高速で移動する被写体を追従するカメラ雲台です。ギヤレス構造にすることで、ギヤ分の軽量化でき、加速性が高まります。静音であるため、録音時の影響も小さくなります。テレワーク用のカメラ台が、あなたを高速で追尾する時代が来るかもしれません。提供:千葉大学 並木研究室

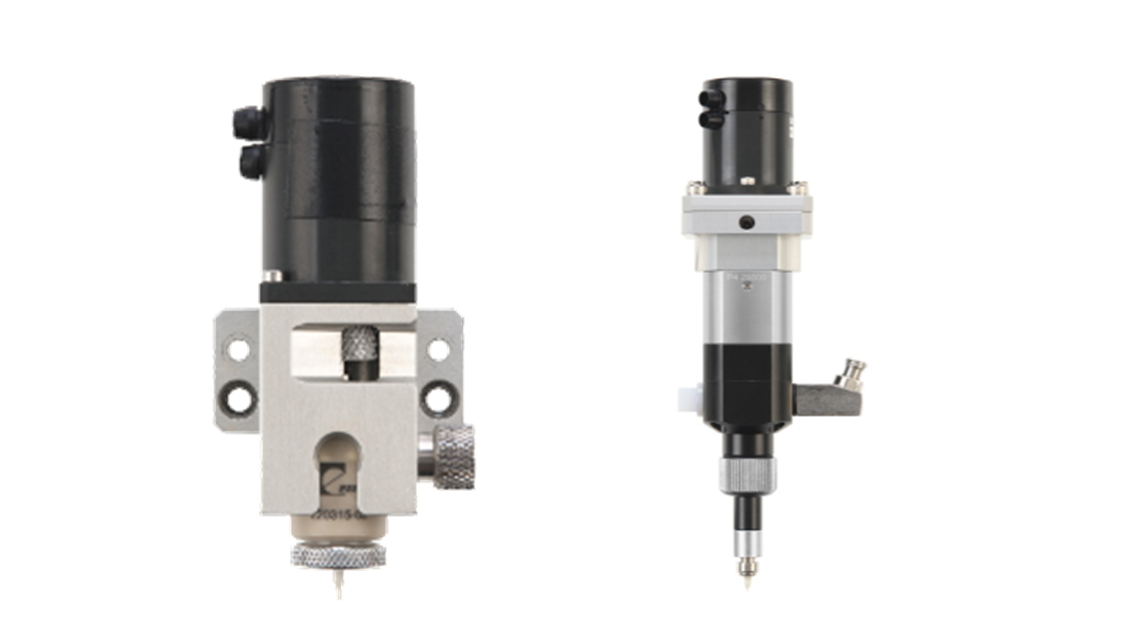
センサレスせん断力測定機構
モータの電流値とエンコーダの位置情報をダイレクトにフィードバックすることで、力学センサ無しでトルク計測・制御が可能です。本研究では介護の自動化を目標に進められています。提供:東京電機大学 五十嵐研究室

XY・パンチルト高速精密ステージ
XY軸、パン&チルトの4軸ともダイレクトドライブのリニアシャフトモーター、μDDモーターを使い、高速・精密位置決め・ノーバックラッシュを実現させています。提供:日本パルスモーター株式会社様

μDDモータによる重り吊り上げ
シンプルにダイレクトに重りを上下させています。年中無休約3年間、高トルク・高耐荷重をアピールし続けております。先にアクリルの土台にひびが入ってきました。
MTL社内デモ機です。

更に製品情報をご覧になりたい方はこちら
製品カタログがダウンロードできます
右記のボタンより各種カタログのダウンロードページにお進みになり、ご希望のダウンロード情報をお選びください。
製品のお問い合わせはこちら
042-746-0123
受付 / 平日9:00~17:30

