小型ダイレクトドライブモータのマイクロテック・ラボラトリー
![]()
- 小型ダイレクトドライブモータのマイクロテック・ラボラトリー
- 研究者の為のカスタム可能な小型ロボットアーム
研究者の為のカスタム可能な小型ロボットアーム
目次
1.Kohakuとは?
2.デモ動画
3.構成部品
4.参考仕様
高バックドライバビリティ小型ロボットアーム「Kohaku」とは
弊社小型ダイレクトドライブモータを使用したメカユニットと、株式会社キビテク社の制御ソフトウェアを組み合わせた
研究開発用途の小型ロボットアームとなります。
弊社とキビテク社の双方の強みを活かし、ユーザ様のご研究内容により、最適なカスタムを提案させて頂きます。
ソフトウェア:キビテク(キビテク社HPへ)
メカユニット:マイクロテック・ラボラトリー
本アームは、高バックドライバビリティが特徴で、滑らかな動作や静音性を実現します。
また、ユーザがアプリケーションを開発しやすいように、
PythonやROSモジュールで容易にアプリケーション組込が可能な形でシステムを提供致します。
位置制御、力制御(電流)、速度制御を切り替えてマニピュレータを制御することも可能です。
コントローラはNVIDIA® Jetson Nano™を搭載しており、高性能GPUを使用した機械学習も可能です。
次世代コントローラNVIDIA® Jetson Orin Nano™の搭載も可能です。
【想定用途】
・制御アルゴリズムの開発、検証
・ビジョンとアームを組み合わせたディープラーニングモデル開発
・力触覚を搭載した安全で静かなロボットアーム開発
・モビリティに搭載して作業をするアーム開発
・リハビリ機器の開発
・RTミドルウェア開発
etc.
第23回計測自動制御学会システムインテグレーション部門講演会(SI2022)
SI2022にてKohaku(旧名Amber)を展示致しました。
https://sice-si.org/si2022/
ロボティクス・メカトロニクス 講演会 2023 in Nagoya(ロボメック2023)
ロオメック2023にてKohaku(旧名Amber)を展示致します。
https://robomech.org/2023/
Kohaku デモ動画
ポイント
・動作音が無いように感じますが、編集無しの音ありの動画です。
・バックドライバビリティを活かして、力を入れずに好きな位置へ動かし、
センシングやティーチングが可能です。
・軸が柔らかいことで、外力に馴染む、
外力に負ける動作が可能ですので本質的安全に寄与します。
・トルクセンサは搭載しておりません。
モータからの情報を阻害する機構や高減速ギヤはございませんので、
電流値によるトルクセンシングと、高分解能ロータリーエンコーダによる位置検出のみでコンプライアンス制御が可能です。
・バッテリー駆動が可能で、コードレスでご使用可能です。
・NVIDIA® Jetson Nano™を使用し、ROSで指令及びPCインタフェースを構成しております。
動作内容①
①ゼロGモード
重力方向に補正をかけた制御で、力を入れずに操作が可能です。
↓グリッパを閉じると②へ
②ペットボトルをハンドリング
定格トルクの50%以下の力で500mlペットボトルのキャリーが可能です。
↓手で押さえつけたことを電流値で検出
①より繰り返し
動作内容②
①ゼロGモード
ハンドを握るとゼロG制御を開始致します。
柔らかい関節に重力補償を加え、軽い力でもアームを操作できます。
②ボタンを押す
位置制御と力制御を組み合わせてボタンを押します。
③フレームをなぞる
位置制御と力制御を組み合わせてフレームを押し当てながらなぞります。
Kohaku:主要部品構成
モータ・ドライバ・コントローラ・メカ部品・バッテリーの、非常にシンプルな構成できております。
| 型名 | 台数 | 製品名 | 備考 | |
| 1 |
上腕ユニット(2軸目3軸目) |
2 |
小型ダイレクトドライブモータ +低減速比ギヤ 15倍 |
外径φ40mm |
| 2 |
上腕ユニット(1軸目) |
1 |
小型ダイレクトドライブモータ +低減速比ギヤ 7.5倍 |
外径φ40mm |
| 3 |
前腕ユニット(4軸目) |
1 |
小型中空ダイレクトドライブモータ |
外径φ40mm |
| 4 |
前腕ユニット(5軸目) |
1 |
小型ダイレクトドライブモータ +低減速比ギヤ 3.6倍 |
外径φ30mm |
| 5 |
前腕ユニット(6軸目) |
1 |
小型中空ダイレクトドライブモータ |
外径φ40mm |
| 4 |
サーボドライバ |
5 |
超小型サーボドライバ |
瞬時電流最大20Arms |
| 4 |
コントローラ |
1 |
NVIDIA® Jetson Nano™ | |
| 5 |
ソフトウェア |
Python、ROS対応 |
キビテク社より提供 |
Kohaku参考仕様
概要 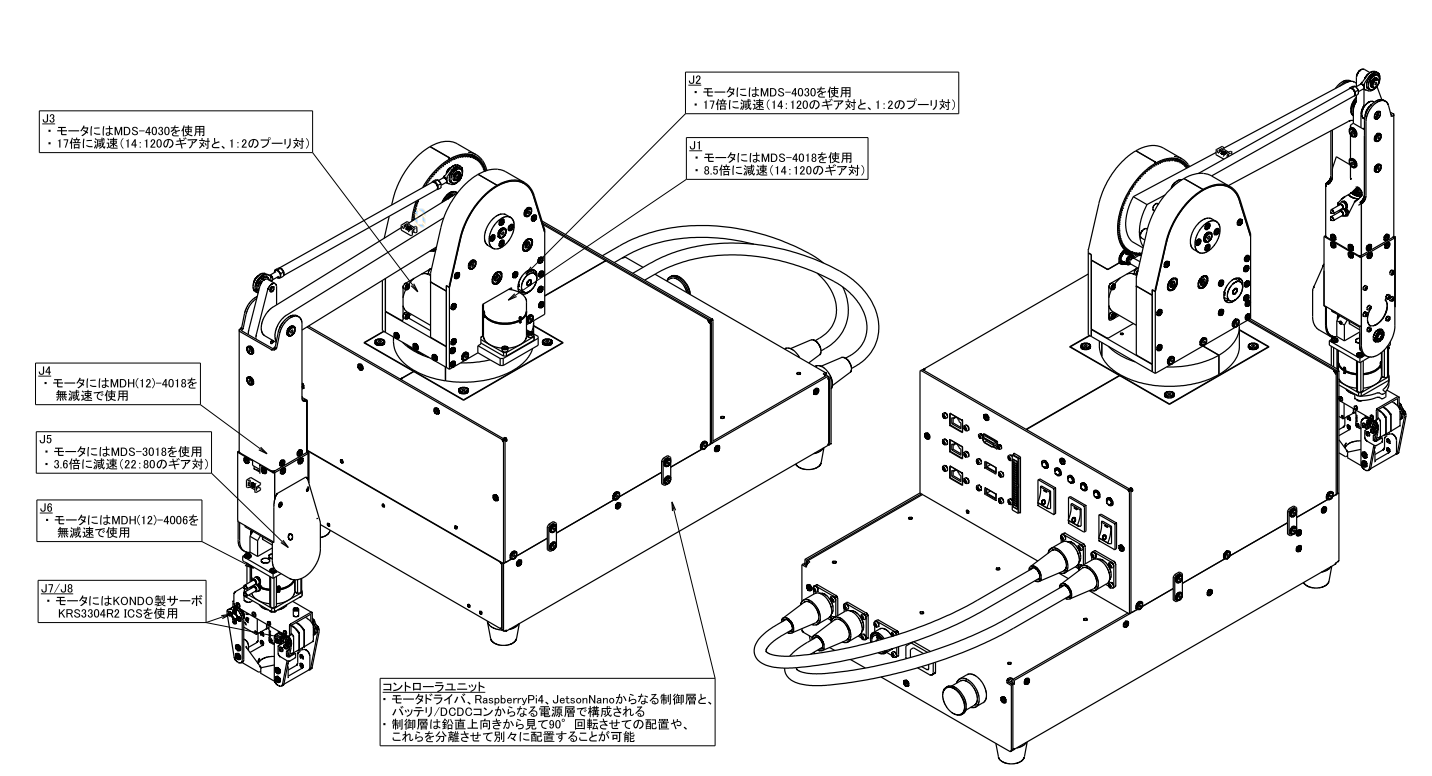
寸法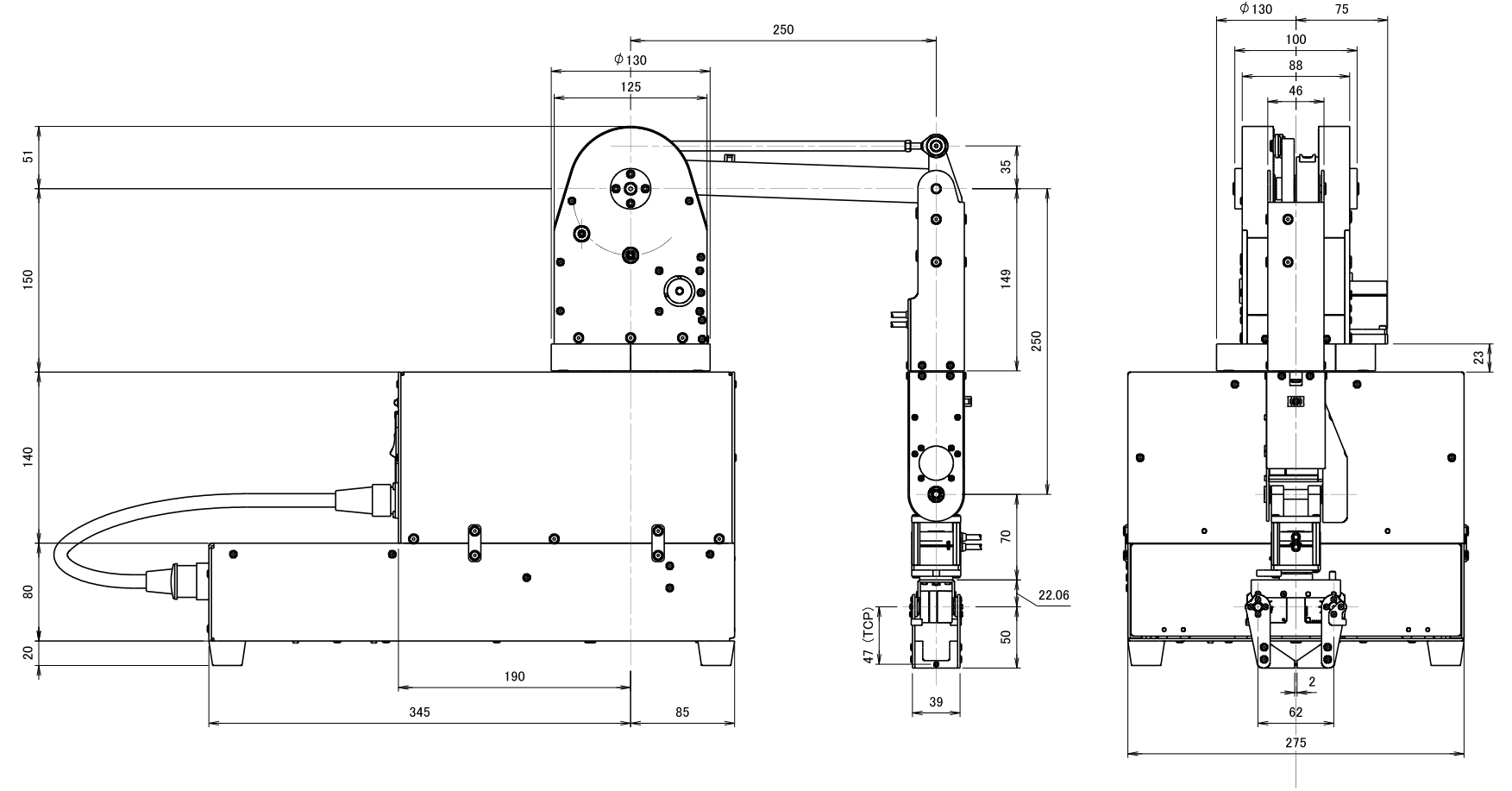
インターフェイス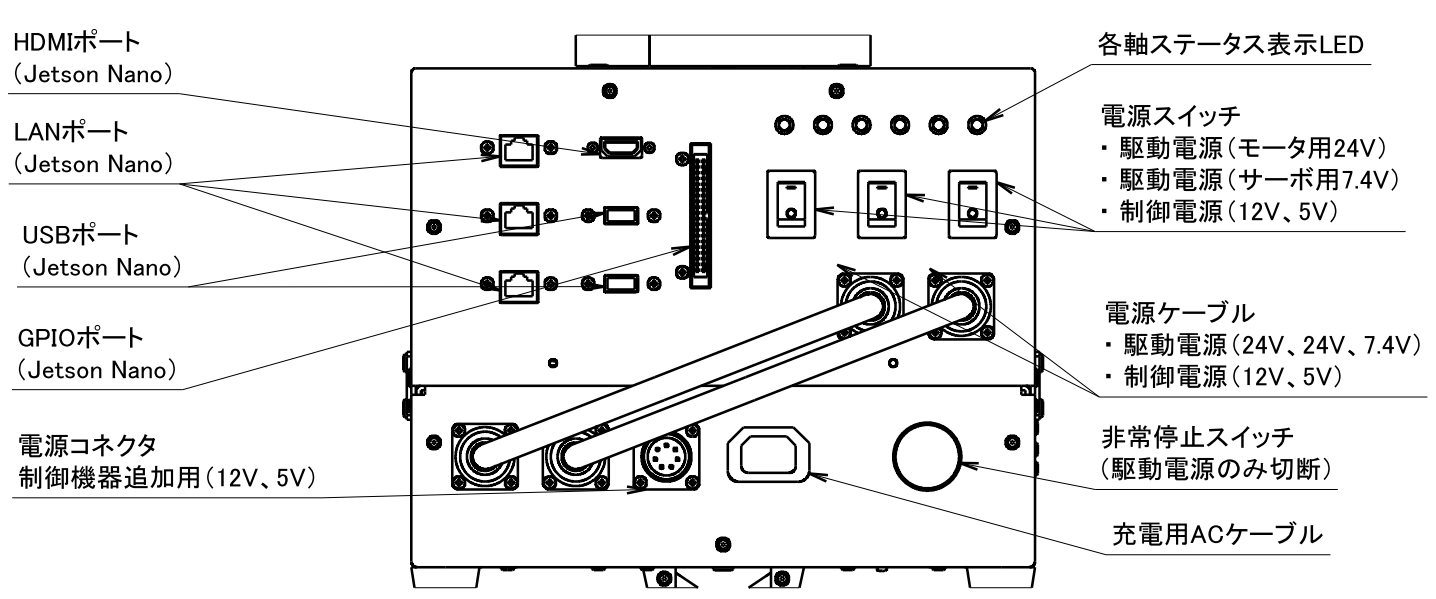
可動域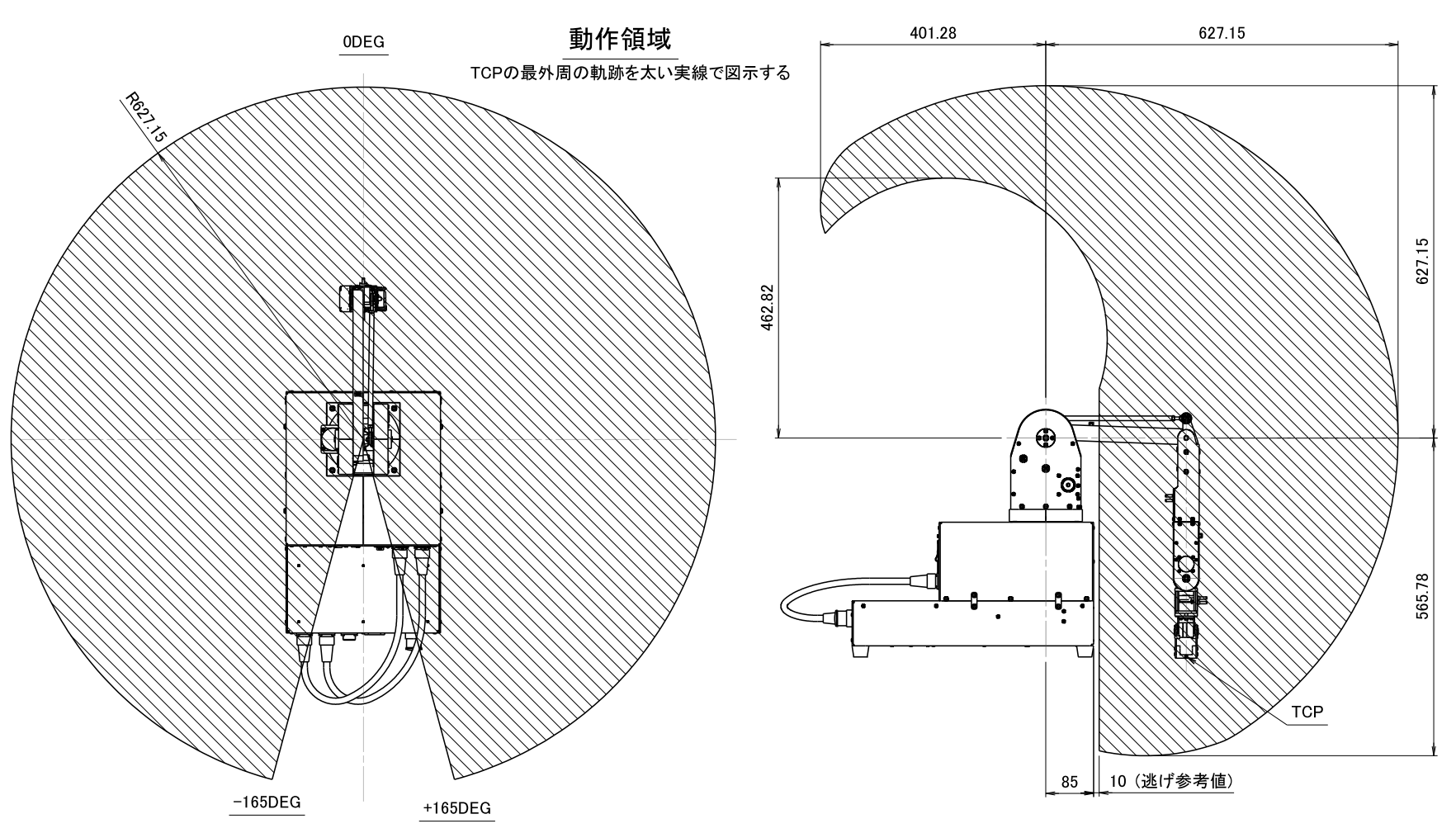
参考スペック
| 項目 | 値 | |
| 1 |
質量 |
15kg |
| 2 |
動作半径 |
627mm |
| 3 |
作業半径 |
600mm (連続動作が可能な動作半径) |
| 4 |
可搬重量 |
1kg以上 |
| 5 |
動作音量 |
40dB |
| 6 |
搭載コントローラ |
・Jetson Nano ・RaspberryPi4 |
| 7 |
ソフトウェア |
Python、ROS対応 (キビテク社より提供予定) |
| 8 |
バッテリー参考駆動時間 |
約6時間 |
軸が柔らかいアームをPythonやROSで自由に開発したい方お待ちしております!
お気軽に問い合わせください!
本システムの共同研究やパートナーを募集しております!
お気軽に問い合わせください!
MTLでは未来の技術者を募集しております!
製品のお問い合わせはこちら
042-746-0123
受付 / 平日9:00~17:30