Microtech Laboratory for small direct drive motors
Real-haptic artificial arm
-
Replacing the function to perceive tactile force
User:Nozaki Laboratory in Keio University
Nozaki Laboratory HP:http://www.fha.sd.keio.ac.jp/jp/nozaki/nozaki.html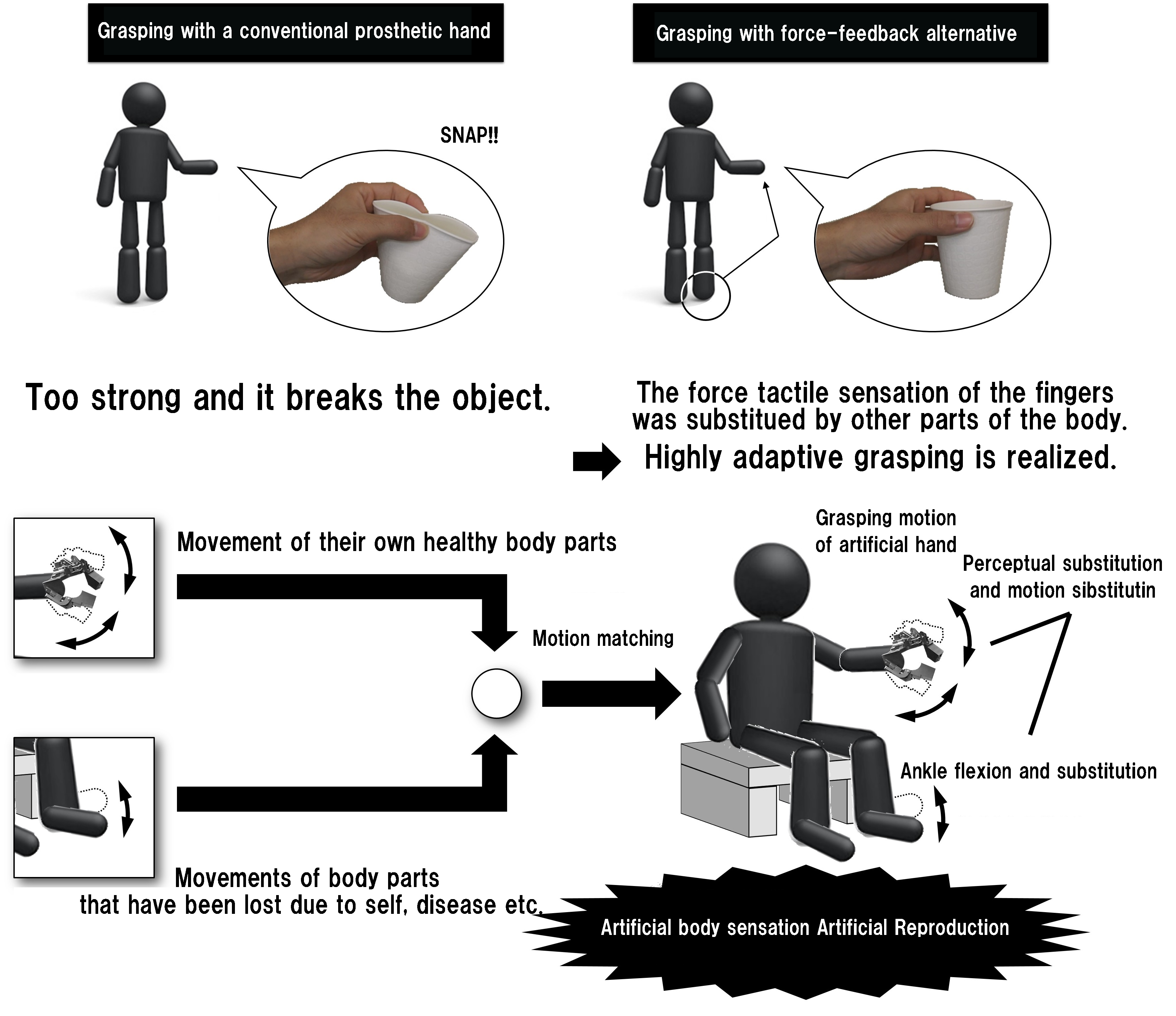
It can transmit the force in both directions between the other body parts and the hand (tactile force transplantation).
・Conventional artificial limbs are difficult to perform delicate work because the feeling of contact is not transmitted.
・With Real-Haptics artificial limbs, you can get close to the feeling of contact with other body parts and perform intuitive and human-like actions!
It is important to have good back drivability in order to feel the tactile force sensation realistically.
One solution is to eliminate the deceleration structure as much as possible.
It has become possible to achieve good back drivability by adopting a high torque μDD motor and reducing the reduction ratio.
Adopted motor
| Model name | Product name | Remarks | |
| 1 |
MDS-2018-9000E |
Hollow μDD motor with a low-speed rate gear |
Outer diameter φ21mm |
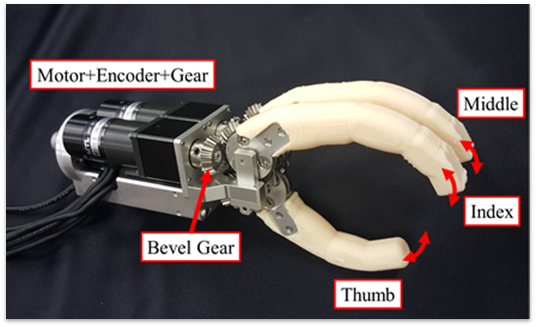
Inside the artificial arm
It is possible to perform intuitive and human-like actions by using μDD motor.
Click here for Inquiries
Open Monday-Friday.
9:00 am to 5:30 pm.