Microtech Laboratory for small direct drive motors
小型ダイレクトドライブモータのマイクロテック・ラボラトリー > ENGLISH > FAQ
FAQ
Contents
Please scroll down to the click contents.
Keyword search
Popular search 「Power supply」「Host」「Return to origin」「Position command」「Error」「Mitsubishi」「Graph」「Execution current value」
About μDD motor specifications
- What kind of motor is μDD motor?
-
AC servo mortor is. Its inside is three-phase PM rotor although the driver power supply voltage is DC. μDD motor can control current with high accuracy,
potision and speed smoothly from ultra-low speed to high speed.
- Why is the μDDmotor capable of high-precision positioning?
-
Slots of our mortor core is divided finer than other companies' general motors.In addition, the resolution of the integrally designed encoder is high,
So our mortor can be high-precision positioning because its encoder monitors a outstandingposition.
- Why do devices using μDD motors have the characteristic of being quiet?
-
This is because noises(below) is eliminated by manufacturing the device with
a direct drive mechanism.
- Can we load directly on the shaft of μDD motor?
-
There is no problem even if the direct load is applied since it uses high-rigidity bearings. However, please be careful not to exceed the allowable load listed in the catalog.
- I'm thinking of making μDD motor reciprocate at a small angle.
Are there any precautions? -
It is not recommended since the reciprocating motion at a fine angle significantly
shortens the life of the bearing.
Shortening life of its mortor can be supressed by rotating once a day for pre-start
operation.
- I am thinking of operating μDD motor in the vertical direction.
Are there any
precautions? -
When using in the vertical direction,
it is recommended to ensure safety when the servo is off and to use it together with
the brake and reducer.
- There is a step on the inner diameter of the hollow shaft type μDD motor
I purchased. Is this a defective product? -
The hollow shafts of MDH-20, MDH-30, and MDH-40 are manufactured by processing from both sides. Therefore, there will be a step in the middle.
When passing the shaft through the hollow shaft, please use one with a diameter
slightly smaller than the drawing dimensions.
- Which is the encoder type, incremental or absolute?
-
Both are available."E" at the end of the model is
incremental (324,000 pulse incremental encoder for 324KE), and "B" is absolute (20bit absolute encoder for 20B).
Please see the product introduction page below for details.
The product introduction page
- How accurate is the shaft of rotation?
-
Both surface runout and shaft runout are 20 to 30 μm. High-precision machining options are also being prepared, so please contact us if you wish.For more information,
please contact us using the inquiry form below.
Contact
- Is it possible to customize in addition positioning pins to a rotating shaft ?
-
Yes,it is possible. Please let us know your desired pin layout and size.
Contact
- Is it possible to increase the number of revolutions by lowering a resolution?
-
MD-20 (resolution after 4 times multiplication 4,480 pulses): Approximately 4,000 rpm
MD-30 (resolution after 4 times multiplication 13,500 pulses): Approximately 1,700 rpm
MD-40 (resolution after 4 times multiplication 324,000 pulses): Approximately 1,500 rpm
MD-70 (resolution after 4 times multiplication 1,296,000 pulses): Approximately 550 rpm
If the encoder is rotated above the response frequency, a cumulative error in the
magnetic pole position will occur and the output torque will decrease.
(It can be fixed by turning the servo on and off)
Please contact us for details as the above rotation speed is the actual value.
Content
- Do you have μDD motor with a decelerator?
-
Yes, there is.
Samples are currently being rented and sold. Please contact us for details.
Geared motor page
- Do you have μDD motor with a brake?
About servo driver specificantions
- How much power capacity does the driver need?
-
Basically, please select by motor rated current value×power supply voltage.
For example, in the case of MDH-4018-324KE, it will be 2.3 Arms x 48V = 110W.
However,We think that there are few applications that give a rated value
for a long time, so please select after calculating the continuous effective load rate.
Contact
- How should I select the higher class driver?
-
MC-200 can be input A pulse command (line driver) or analog current command
(0V ± 5V) MC-200 from the I / O port (CN4).
Also encoder feedback can be obtained in ABZ phase (differential) for the
incremental type and RS-422 ASCII or binary for the absolute type.
In addition, commands can be applied via USB or SPI communication.
Please select a driver that supports the input / output methods above.
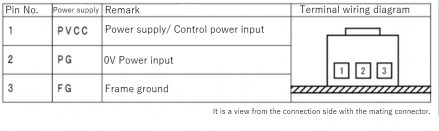
- Please tell me the pin layout of the CN1 (power supply) connector.
-
- I am using MC-200-7220A. Please tell me its setting method when giving a
command from the higher ranked PLC. (Position control) -
Please change the following parameters on the parameter tab of MTL Param.
# 100 Operation mode Initial value 0 → 30 (position control, external command)
# 101 Upper interface setting Initial value 0 → 1 (digital IO)
* The above parameters are valid when the power is turned off / on after transfer and save.
If you have any problems, please contact us using the inquiry form below.
Contact
- I am using MC-200-7220A. Please tell me the position command pulse method from
the higher ranked PLC. -
We set with parameter # 300.
0:Pulse train / code signal format(PLS・DIR)
⇒Enter the pulse signal of the desired operation and the ON / OFF signal in the rotation direction (1 for CW, 0 for CCW).
1:CW・CCW signal format
⇒nter the pulse of the desired operation to the pin in the rotation direction you want to operate.
2:2 phase(90°phase difeerence)signal format
⇒Indicates the rotation direction and operation of the desired operation pulse of
2 phases by 90 ° phase difference.
- What is maximum frequency of the pulse signal that can be input to the
MC-200-7220A? -
It will be 10MHz.
- Please tell me about the output of position information from the driver when
an absolute type motor is connected to MC-200-7220A. -
Position information is output from pins 27 and 28 of the CN4 connector.
Select RS422 differential output from (1) ASCII code and (2) binary code.
Also, change the following parameters from the Prameter tab of MTLPram.
# 316 Encoder position output mode ASCII code: 0, binary code: 1
* This parameter is valid when the power is turned off / on after transfer → save.
If you have any problems, please contact us using the inquiry form below.
Contact
- If MC-200 drives a motor with a power supply of 48V, what are the motor
specifications when it is driven using 24V power supply? -
For example, in the case of MDH-7018, the instantaneous maximum torque and
continuous stall torque are reduced by about 70%.
Although it depends on the operating conditions and load conditions,
we recommend using a 48V power supply as much as possible.
Although it depends on the operating conditions and load conditions,
You can download the torque characteristic diagram of each series from here.
If you have any problems, please send us a E-mail!
Contact
- What is the current consumption of μDD motor+MC-200?
-
The motor current will change depending on the model and usage conditions.
The following factors are mainly related to the current consumption.
The following factors are mainly related to the current consumption.
(1) Motor (2) Encoder (3) CPU (4) Others (peripheral such as I / O)
Example) When the main power supply is 48V.
・ Current consumption when servo is off is encoder + CPU + others = approx.
150-250mArms.
・The main current consumption when the servo is ON is the current when the servo is OFF + the motor drive current.
When the motor drive current is 3 Arms The current consumption is about 3Arms x
+0.3Arms = 3.3Arms.
The driver alone depends on the I / O port used for operation,
It is about 200-400mArms.
If you have any problems, please contact us using the inquiry form below.
Contact
- What is the current consumption of the I/F power supply in CN4 of MC-200-7220A?
-
It is mainly the current consumption of the CPU microcomputer inside the driver,
which is 50 to 100mA.
If you have any problems, please contact us using the inquiry form below.
Contact
- Which input is recommended when you want to give an emergency stop signal to the
driver from the higher ranked driver? -
It is recommended to set emergency / deceleration stop to DIN and input to DIN.
・Emergency stop: Physically disconnect the power line of the motor inside the driver (alarm output)
・Deceleration stop: Switch to speed control and give zero speed command.
⇒ It decelerates and stops depending on the deceleration parameter of # 109
Internal command deceleration. (Servo is ON)
If you have any problems, please contact us using the inquiry form below.
Contact
- I want to move a motor manually when the servo is off. At that time,
can an
encoder read the amount manually turned and display
the movement amount on the PC? -
Since the encoder value is output from the driver, it can be obtained by I / O or USB.
- Is it possible to get an encoder signal from a driver?
-
It's possible. There are two acquisition methods in our driver MC series.
① The first way is to read an encoder value by USB connection.
It can be displayed on PC using the free app MTLparam.
* From $E to reply, there is a delay about 20-50msec
② A, B and Z phase are output from an output driver CN4 (pin23 to 28).
Since the signal is branched inside the driver, it is possible to obtain an encoder signal with low latency.
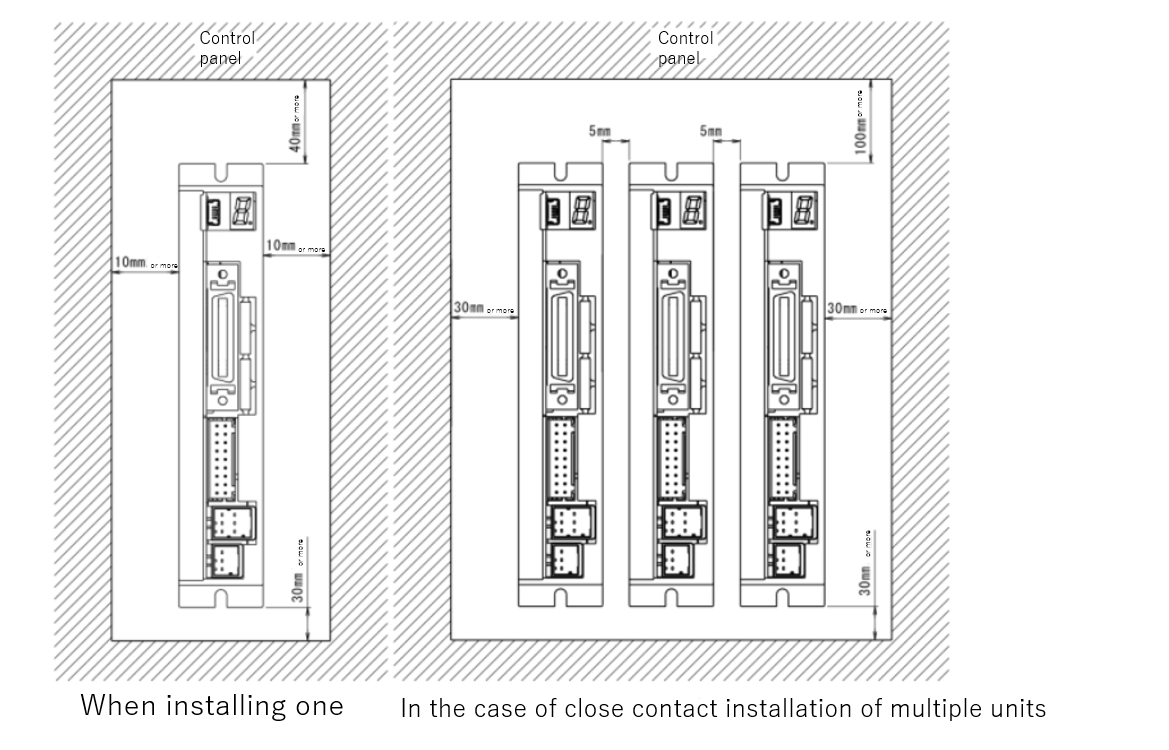
- Do you have any precautions in a driver installation environment inside the control
panel? -
Please install the driver as shown in the figure.
Make sure that the temperature inside the control panel does not become too high by
installing a cooling fan.
When installing the driver upright as shown in the figure,
please install it so that the CN1 (power supply) connector is on the lower side.
- How should I measure a force applied to the motor?
-
It is possible by feeding back the effective current value of the motor.
This value can be converted to a torque value by multiplying it by the torque constant of the motor.
MC-200-7220:Via USB
MC-200-7220A:CN4 analog monitor output via USB
(output at 2.5V ± 2.5V. Scale changed with parameter # 315)
MC-200-7220D:Via USB, via SPI communication (IEEE754 single precision)
- Please tell me a procedure to return to a reference point.
-
We will introduce a method using the Z phase (origin signal) of the motor encoder.
①Input the home return pulse to any of pins 8 to 11 of the external connection
connector CN4 of MC-200. (For example, you will use DIN1 of pin8)
②On MTL Param,
Changed the setting value of "# 100 operation mode" to "30"
Changed the setting value of "# 101 upper interface setting" to "1
Change the setting of "# 102 origin return operation mode" to "1" when returning to the origin in the CW direction, and to "10001" when returning to the origin in the CCW direction.
Change "# 107 origin return speed" to an arbitrary value.
hange the setting value of "# 304 External input DIN1 mode selection" to "3",
or execute "HOME: Return to origin" → Confirm → Transfer from the drop-down list.
* This parameter is valid when the power is turned off / on after saving.
③With the servo turned on, input a pulse to pin8 of CN4. (Active Low, 50ms or more)
④ The motor rotates according to "# 102 home return operation mode" and "
# 107 home return speed", and when Z phase is detected,
it stops and the count is cleared.
- Can MC-200 support field networks?
-
Currently, it can't support field networks.
Below, we are preparing for network support.
・EtherCAT
・MECHATROLINKⅢ
* Correspondence time is undecided
Network support is possible with servo amplifiers from Mitsubishi Electric (SSCNET III / H) and Panasonic (EtherCAT, R-TEX).
Click here for details.
- Is it possible to command the position and speed using USB communication?
-
Yes, Command control is possible from CN5 with the following USB protocol.
Communication speed: 9600, 19200, 38400, 57600bps * Initial value is 59400
bit length: 8bit
Parity: None
Stop bit: 1bit
Flow control: None
We recommend using the dedicated software MTL Param for initial settings and parameter settings.
A command manual is available for the command list.
Download from here(Please require user registration)
About driver error
- 7-segment display "2" blinking: Encoder error alarm occurs.
-
One of the encoder wires may be disconnected from the connector.
Please check the wiring.
If you would like to have it repaired, please feel free to contact us.
Contact
- 7-segment display "5" blinking: When the servo is turned on, an overspeed alarm
occurs. -
It is likely that the default encoder resolution is different.
Check "Model setting screen transition" from "COM" on the upper left of the software screen,
and check the motor model, resolution, and encoder type.
It is OK if the "model" in the center of the screen matches the name of the motor body.
Please refer to the description of the initial settings on page 6 of the "MTL Param Application Manual_ver2.0".
Click here to download the manual
- 7-segment display "6" blinking: Overcurrent error alarm occurs.
-
The driver output current is output instantaneously maximum or more than the rated
current.
It is possible that the load and operation you are using are large relative to the motor.
Please consider resetting the load and operation, checking the mounting accuracy,
and changing the motor driver (capacity increase).
Contact
- 7-segment display "7" blinking: An excessive position deviation alarm occurs.
- 7-segment display "A" blinking: Low voltage error alarm occurs.
-
There is a high possibility that the capacity of your power supply voltage is insufficient.
In particular, check the output current of the power supply before making a selection.
For capacity selection, refer to this FAQ page: "How much power supply capacity do it
need?" about servo driver specifications.
- 7-segment display "D" blinking: An electronic thermal alarm occurs.
-
The driver output current is more than the value of parameter No. 401 to 405.
It is possible that the load and operation you are using are large relative to the motor.
It is possible that the load and operation you are using are large relative to the motor. The initial value is set at 70 to 80%, but it can be expanded depending on the
operation cycle and cooling environment.
However, please contact us before making any changes as it will greatly affect the
damage to the motor.
Contact
- 7-segment display "3" blinking: Counter overflow occurs.
-
The cumulative value of the count exceeds the ±32 bits (±2,147,483,647pulses) range.
It can be restored by resetting the counter.
This alarm does not occur when the speed control mode is set.
About the dedicated software "MTLParam"
- COM is not recognized.
-
①Supported OS is Windows 10 32bit / 64bit.
(MAC OS and Windows 7 are not available.)
②Change the port number of "COM" and recognize it again.
③Change the "baud rate" and recognize it again. (The initial value is 38400.)
④ Please check the length of the USB cable. (The standard is within 5m.)
⑤In cases other than the above, there may be a malfunction, so please contact us.
Contact
- Should I enter the encoder value on the MODEL setting screen after multiplication by 4?
-
Enter the encoder resolution before multiplication by 4.
For example, for MDH-3018-108KE, enter 108,000 pulses.It is OK if the "model" in the center of
the screen matches the model of the connected motor.
- What is the reccomended waveform sampling time for graphs?
-
It is 50 to 100 ms.
Please close unnecessary items such as "status" and "program" before use. Please note that it may differ from the actual time if you set it too fast.
- I would like to adjust the gain of the current control loop. Is there a recommended
gain adjustment method? -
In the case of MC-200-7220A,
analog monitoring of the execution current value is possible from the CN4 connector of the driver.
(By default, it is assigned to pin 22)
Adjust the responsiveness between the higher ranked command current value
and the effective current value using the following two parameters
#200 1st current control proportional gain (P) [mV / A]
#201 2nd current control Integral gain (I) [mV / A ・ s]
When issuing a current command from the higher ranked controller,
also check the parameter settings below.
#100 Operation mode Initial value 0→32
#101 Upper interface setting Initial value0→1
- The motor does not move even if HOME button or POSITION button is pressed when the servo is on in CONTROL. What’s wrong with that?
-
○Please see page 12 of the MTLParam Application Manual for instructions on how to use it.
・Please check whether the control method is set to internal command and position control.
・If a command error occurs, the motor MODEL setting may be different, so please set the model again in "Model setting screen transition" from the top of the app screen "COM".
If the problem is not solved, please contact us.
Contact
About purchase methods
- Please tell me the minimum lot and delivery date.
-
It is possible to sell from one unit.
Since it is a made-to-order product, it usually takes about one month after receiving an order, but please contact us as it may be in stock.
- I would like to purchase μDD motor, please tell me how to purchase it.
-
There are two ways to purchase μDD motor.
1.First of all, please send a request for quotation to us by fax or email.
The sales staff will reply to you.
2. From the agency
The agency differs depending on each religion.
We will help you including support.
Please contact us from the inquiry form for details.
Contact
About support,demo,etc
- Do you have a rental machine?
-
Yes, we have
Please contact us as production may be required deending on the model.
The rental period is within 3 weeks.
- I would like to obtain product specifications and instruction manuals.
-
We have prepared for each model, so please contact us using the inquiry form below.
Contact
- I would like to export a device incorporating μDD motor overseas.
Is it possible to issue the parameter sheet? -
A parameter sheet is required for export to overseas。
Please download the application form from the URL below and contact our sales staff
after filling it out.
Please note that it will take about a week to issue, so please make a request
with plenty of time.
https://www.mtl.co.jp/support/higaitou.html
- Are there CE mark compatible product?
-
All μDD motors are compatible.
Currently, the product is not marked, but a declaration of conformity can be issued.
Please contact us if you wish.
Contact
- I would like to see the actual operation of μDD motor.
Is it possible to demonstrate it? -
We have a showroom at our "Nakamachi Development Center".
Please contact us from Reservations for a visit and demo machines.
In addition, there is a portable type demo machine, so if you would like to have a
demonstration at your office, please contact our sales staff directly or use the
Contact
- Can you provide local support overseas?
-
The support system(when our products are exported overseas)is as follows.
If you wish to investigate the product, please send the product to us for investigation
and analysis.
(* We cannot provide business trip support to overseas sites.)
If you plan to export our products overseas, please let us know the following details in advance.
・ Destination country
・ End user name
・ Usage (device name)
When exporting our products overseas, please make sure that you evaluated fully them in Japan.
If you would like to issue a parameter sheet, click here.
About collaboration with other companies.
Mitsubishi Electric
- Is it possible to connect with Mitsubishi Electric J4 amplifier?
-
It Is possible.
Please check the details in the Mitsubishi Electric J4 Collaboration Catalog.
- Is it possible to connect with "MR-J4-〇〇A" and "MR-J4-〇〇B" of AC200V?
-
It is possible. (MD20 series is not possible due to pressure resistance)
Please check the details in The Mitsubishi Electric J4 Collaboration Catalog.
- Is it possible to connect the "MR-J4-〇〇A" and "MR-J4-〇〇B" currently using to
μDD motor? -
It can't connect.To drive μDD motor, the partner manufacturer's dedicated amplifiers "MR-J4-〇〇A-J001" and "MR-J4-〇〇B-J001" are required.
Please check the details in The Mitsubishi Electric J4 Collaboration Catalog.
- Is it possible to connect CC-Link IE compatible amplifier to μDD motor?
-
It can't connect. Only SSC-NETⅢ compatible amplifiers can be collaborated.
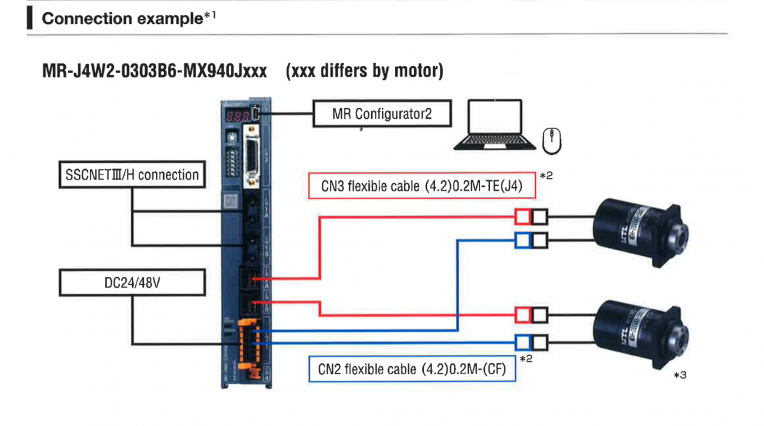
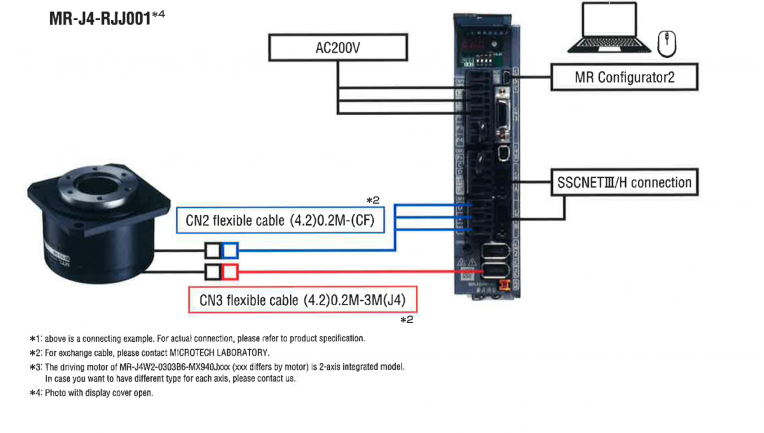
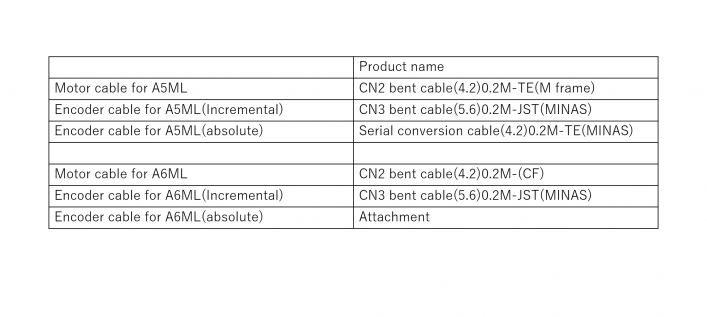
- Is it possible to purchase a connector cable for connecting μDD motor and
a J4 amplifier? -
It is possible. A conversion connector cable is available as shown in the figure below.
Use the MTL standard extension cable to adjust the length between the μDD motor and
the amplifier.
Please check the details in Mitsubishi Electric J4 Collaboration Catalog.
- Do you have a product specification for the J4 amplifier for collaboration?
- How do I buy a motor and an amplifier?
-
It can be purchased as shown in the figure below.
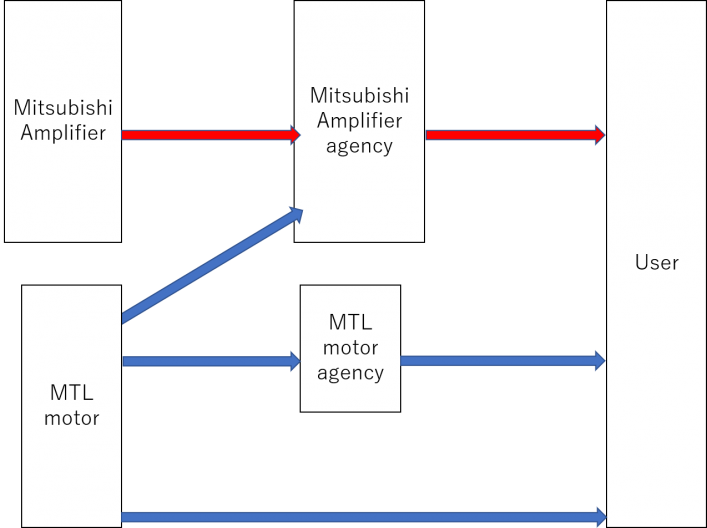
If you have any questions, please contact us.
Contact
- What should I do in case of trouble?
-
First, the user is required to perform a primary diagnosis.
(visual inspection, diagnosis from alarm, product replacement survey, etc.)
Please contact us if it may be caused by the motor or combination,
or contact the amplifier manufacturer if it is caused by the amplifier.
Contact
- Is it possible to use it with the amplifier capacity reduced?
-
It is possible. Please tell us the motor model and amplifier capacity since the output
characteristics of the motor will change.
Contact
- Is there a recommended inertia ratio?
-
It's basically 50 times. More is possible by tuning.
Panasonic
- Is it possible to connect to a Panasonic amplifier?
-
It is possible.for detail.
Please check the Panasonic Collaboration Catalog
- Is it possible to connect with "A6L" of AC200V?
-
Is possible. (MD13 and 20 series are not possible due to pressure resistance)
Please check the Panasonic Collaboration Catalog for details.
- Can I connect my MINA amplifier to μDD motor?
-
It depends on the amplifier model. (Linear motor compatible amplifier, etc.)
However We recommend a new purchase, please contact us for details. Contact
- Is it possible to purchase a connector cable for connecting a μDD motor and a MINAS
amplifier? -
It is possible from us. A conversion connector cable is available.
Since it is 0.2m, please use the MTL standard extension cable to adjust the length
between μDD motor and the amplifier.
- Is it possible to connect the absolute encoder to the μDD motor?
-
It Is possible. "MFC-10P" conversion board BOX is required between the encoder and
the amplifier. This is also available for purchase from our company.
Only A6L series is available.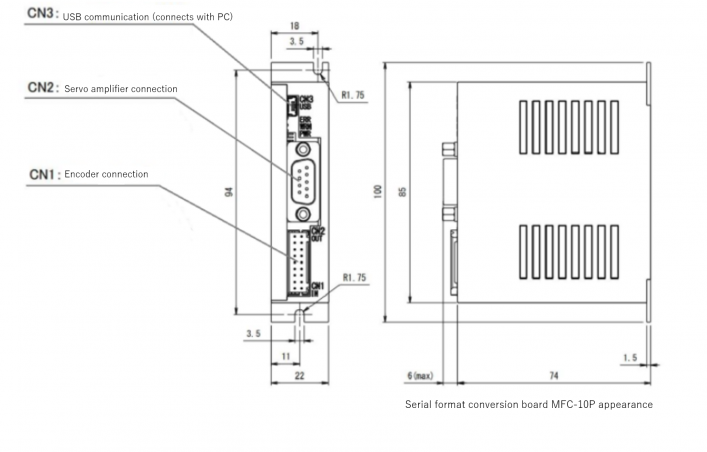
- Is it possible to connect an EtherCAT compatible amplifier to a μDD motor?
-
You can connect with "A6BL".Please see page 25 of the Panasonic Collaboration Catalog
- How do I buy a motor and an amplifier?
-
It can be purchased as shown in the figure below.
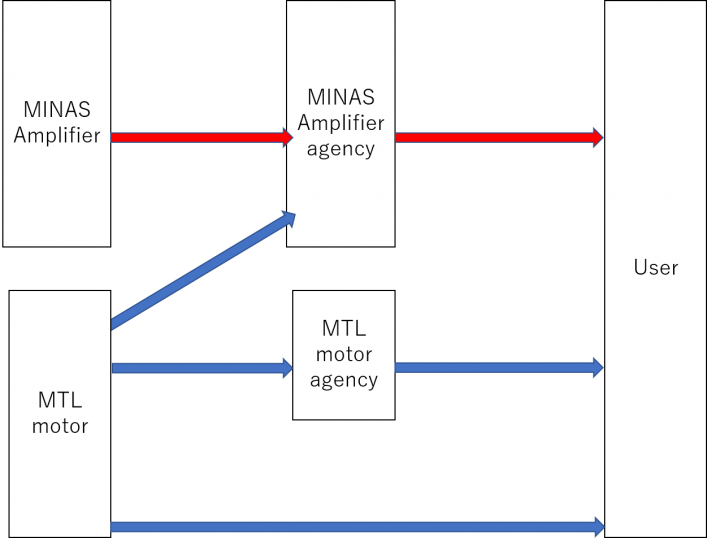
If you have any problems, please contact us using the Contact form below.
Contact
- What should I do in case of trouble?
-
First, the user is required to perform a primary diagnosis. (visual inspection, diagnosis
from alarm, product replacement survey, etc.)
If it is caused by the motor or combination, please contact us.
If it is caused by the amplifier, please contact the amplifier manufacturer.
Contact
About customization
- I would like to request customization, can you handle it?
-
Please contact us for your desired specifications.
We will consider whether or not to respond depending on the content.
If possible, we will exchange production costs, delivery dates, and specifications.■ Encoder resolution change ■ Tap processing in hollow shaft
■ Low dust generation specifications
■ Hollow shaft expansion ■ Cable length / connector change
■ Motor case flangeless structure
■ Output shaft structure change (pinion gear, positioning pin addition, knurling,
aluminum alumite, etc.)
Customization case introduction page
About Master-slave
- What is Master-slave?
Click here for Inquiries
Open Monday-Friday.
9:00 am to 5:30 pm.