Microtech Laboratory for small direct drive motors
A quiet communication robot
-
A robot partner considering quietness
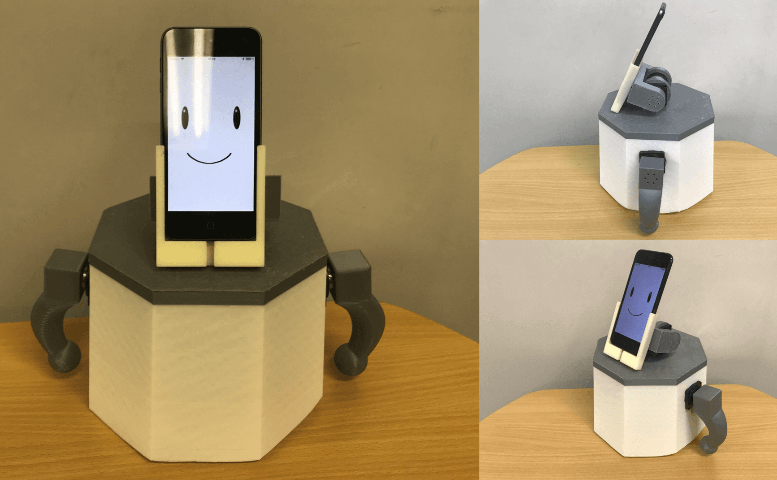
「New iPhonoid」―User:Kubota Laboratory in Tokyo Metropolitan University
Kubota Laboratory HP:http://www.comp.sd.tmu.ac.jp/kubota-lab/hp/index_jp.htm
Outline of this study:Click here
■Excerpts from the outline of the following research
The purpose of communication robots is to provide services such as information support at airports and shopping centers, support for the elderly.
Integration of various modules is important to aim for rapid practical application in an aging society. In our laboratory, we have been developing robot partners using smart devices.
However, there was a problem that it was difficult to hear the utterance of the robot due to the motor drive sound during operation.
In this paper, we developed a module that uses a direct drive motor in the drive part and developed a structure that maintains quietness.
Main adopted motor
| Model name | Production name | Remarks | |
| 1 | Ultra small-sized direct drive motor |
Outer diameter φ30mm、 Resolution 432,000C/R |
Reasons for adopting μDD motor :Quietness

New iPhonoid
- μDD motor

Conventional and typical iPhonoid
- Geard motor
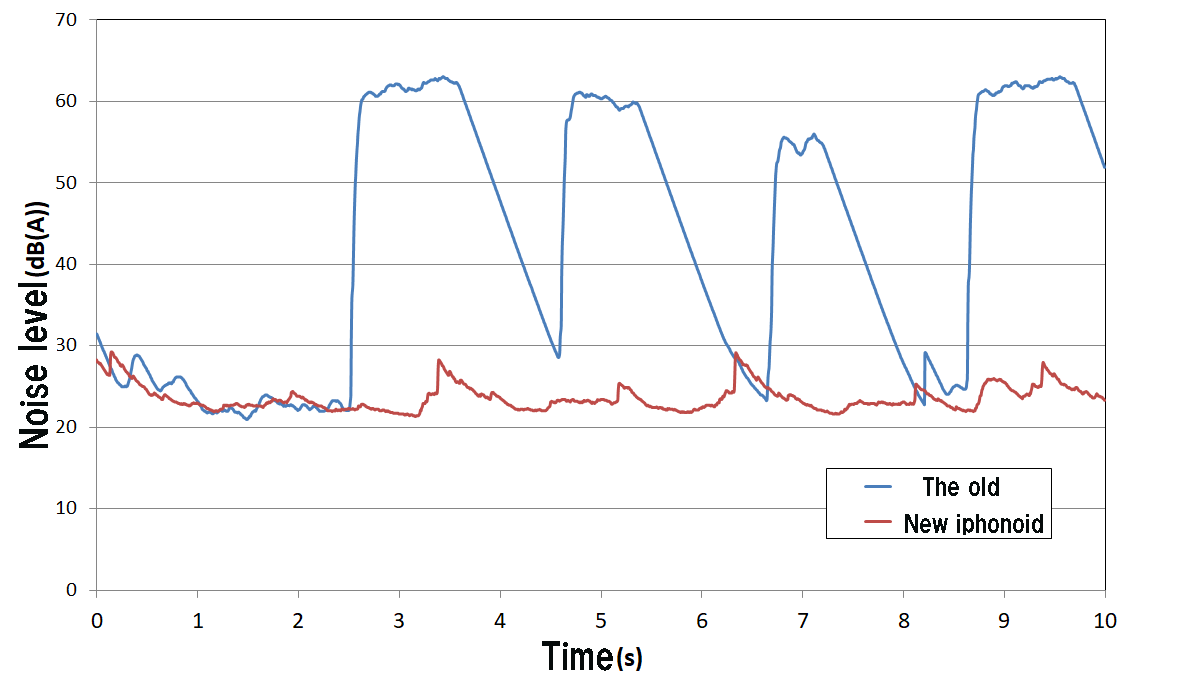
The graph of the measured noise level is shown above.
The result was about 62 dB for the conventional iphonoid and about 28 dB for the new iphonoid.
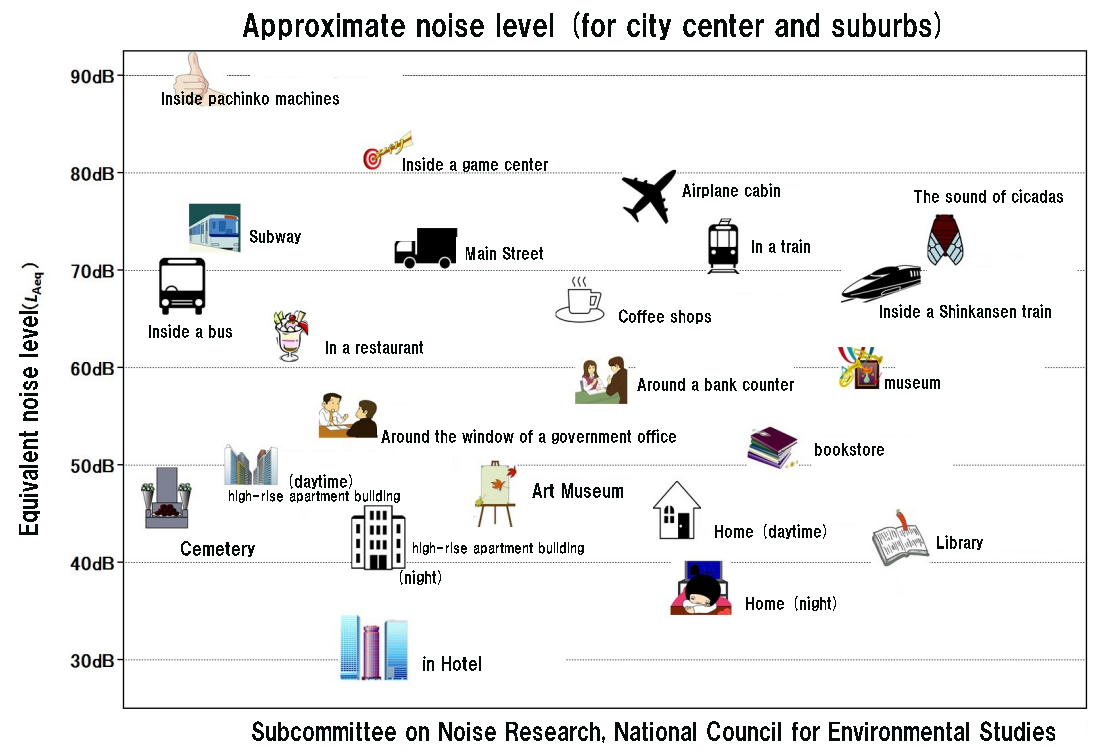
Both patterns emit noise around 60 dB, which is the same as in bank counters and family restaurants. (Refer to the figure below: Estimated noise) This noise is a value that hinders conversation in a robot that communicates with the elderly and small children at home.
On the other hand, the new iphonoid has one movement (two patterns of raising the arm and returning to the original posture) from 3 to 5 seconds.
It rises by about 6 dB when raising the arm, but all are below 30 dB.
This is a value below the hotel room and does not affect communication at all.
By using a μDD motor, It is possible to develop a quiet robot.
Click here for Inquiries
Open Monday-Friday.
9:00 am to 5:30 pm.