小型ダイレクトドライブモータのマイクロテック・ラボラトリー
- 小型ダイレクトドライブモータのマイクロテック・ラボラトリー
- 製品紹介
- 機械学習用小型ロボットアーム KOHAKU Entry
機械学習用小型ロボットアーム KOHAKU Entry
目次
1.KOHAKU Entryとは
2.製品概要
3.機能・スペック
4.KOHAKU Entryでできること
5.デモムービー
6.出典情報
1. KOHAKU Entryとは
小型 × カメラ搭載 × 機械学習
「KOHAKU Entry」— 今までにないロボットアームで新しい可能性をー。

サイコロの目を判断して1の目が上に来るようにしている様子
 サイコロの上部を解析し、合計値を推論している様子
サイコロの上部を解析し、合計値を推論している様子
2. 製品概要
内容:
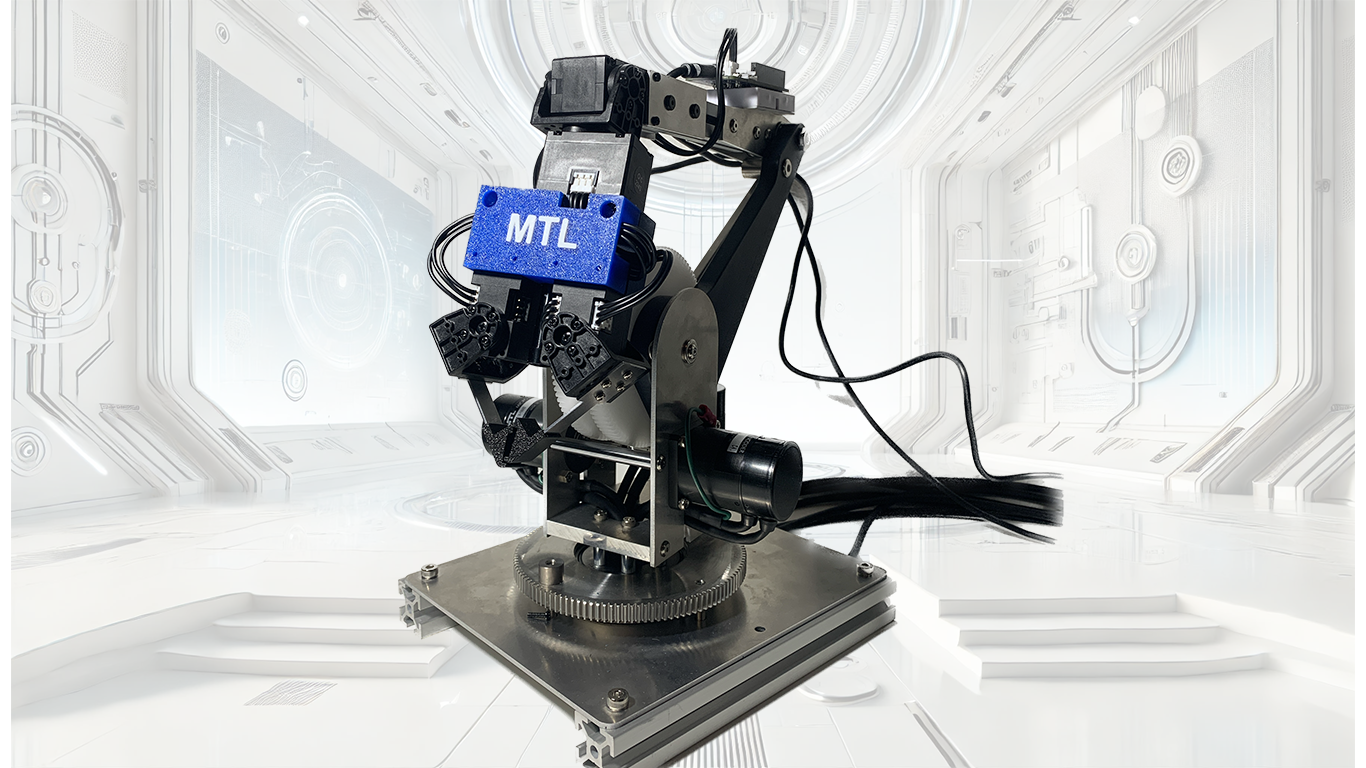
- 小型・軽量設計: 重さ約2kg、コンパクトで机の上でも簡単に設置可能。
- カメラ内蔵: 単眼カメラを搭載し、高精度なAI画像認識に対応。 シンプルながら高性能な視覚認識を実現。
- 機械学習対応:カスタマイズモデルの学習に最適な環境を提供し、柔軟な応用が可能。
- 経済的価格: 導入しやすい価格で、教育機関や研究開発に最適。
3.機能とスペック
- カメラ性能
- 解像度:1920×1080ピクセル
- フレームレート:30fps
- 視野角:80度
- ロボットアーム性能
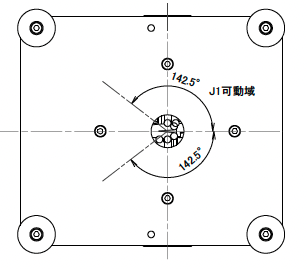
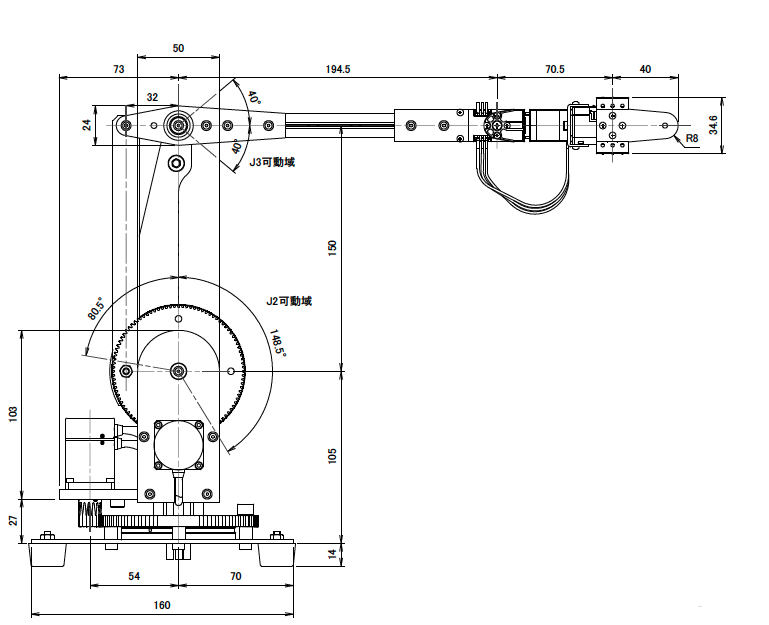
- 最大可動範囲:腕を伸ばしてR410mm(大ギアの軸からTCP)
旋回軸で左右に±142.5° - 可動軸数:X軸/Y軸/Z軸(合計3軸)
- 最大荷重:定格 2N 瞬時13.5N
- 最大可動範囲:腕を伸ばしてR410mm(大ギアの軸からTCP)
- 機械学習機能
に最適です。
*Unity環境はお客様ご自身でご準備いただく必要がございます
- サイズ・重量
- 本体サイズ:160 mm × 140 mm × 283 mm
- 重量:2.2kg(軽量設計で持ち運びやすい)
可動域
4.KOHAKU Entryでできること
内容:
- 教育・学習
- 機械学習やAIの実習用教材として最適。
- 実験室や教室で安全に使用可能。
- 研究開発
- 小型カメラでの画像認識や動作確認のプロトタイピングに最適。
- AIモデルの実証試験に活用。
- 個人プロジェクト
- 手頃な価格とサイズで、個人の趣味やプロトタイプ開発に最適。

ROS2 humbleを使用しての制御可能

Unityでシュミレーションしつつ機械学習することも可能。
5. デモムービー
・ディープラーニングにより、サイコロの目だけでなく大きさ、色、透明なものそれぞれに合わせた推論を立てます
・リアルタイムに情報を処理して今何をしているか、どこに何のサイコロがあるかを発信可能です。
・トルクセンサは搭載しておりません。
モータからの情報を阻害する機構や高減速ギヤはございませんので、
電流値によるトルクセンシングと、高分解能ロータリーエンコーダによる位置検出のみでコンプライアンス制御が可能です。
・バッテリー駆動が可能で、コードレスでご使用可能です。
動作内容①
①推論 サイコロの現在位置と目を解析します。
②動作開始 プレイエリアの4点を地点A,B,C,Dとしサイコロを搬送します。
この時、サイコロを掴む高さや向きはロボットが考えています。
③1ループ終了後一度上部からサイコロの情報を解析し、その後2ループ目に入ります。
第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)
SI2024にてKOHAKU Entryを展示予定です。
(12/18~20 SI学会危機展示会場 7F)
製品のお問い合わせはこちら
042-746-0123
受付 / 平日9:00~17:30

