小型ダイレクトドライブモータのマイクロテック・ラボラトリー
- 小型ダイレクトドライブモータのマイクロテック・ラボラトリー
- ENGLISH
- Products
- Hollow Low Gear Ratio Equipped μDD Motor
Hollow Low Gear Ratio Equipped μDD Motor
Addressing the Customer Demand:
Hollow Reduction Geared Motor with Enhanced Torque!
|
Hollow Shaft |
Directly utilize the main feature of μDD Motor, which is the |
|---|---|
|
Low Gear Ratio |
Focused on backdrivability and offer two gear ratio options: 1:3 and 1:9. Thanks to the high torque of the μDD Motor, there ratios are practical |
|
Compact Size |
By pinionizing the motor shaft, we have reduced the size. |
Major Applications

MagLinkage
Actuator that enables high-speed gripping while absorbing impacts, similiar to human capabilities. By taking an opposite approach to conventional robots, which control rigit actuators softly, we have achieved operations that were preciously deemed impossibleClient:Ishikawa Group Laboratory, University of Tokyo /
Harada Laboratory, Osaka University

Real Haptic Prosthesis
providing a sense of touch. Unlike conventional myoelectics hands with ON/OFF movements,
this prosthesis allows precise adjustment of force.
Client:Nozaki Laboratory, Keio University

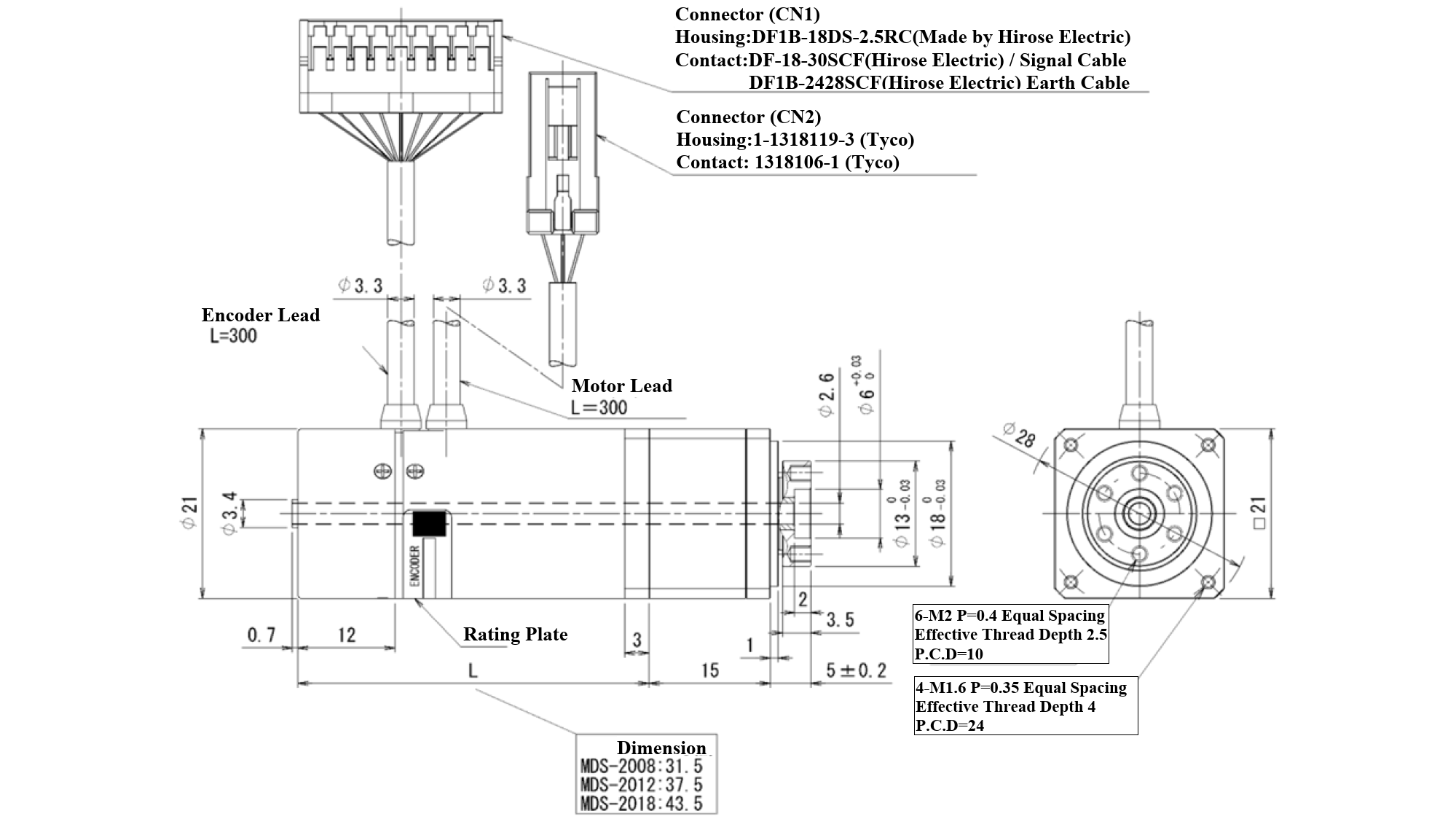
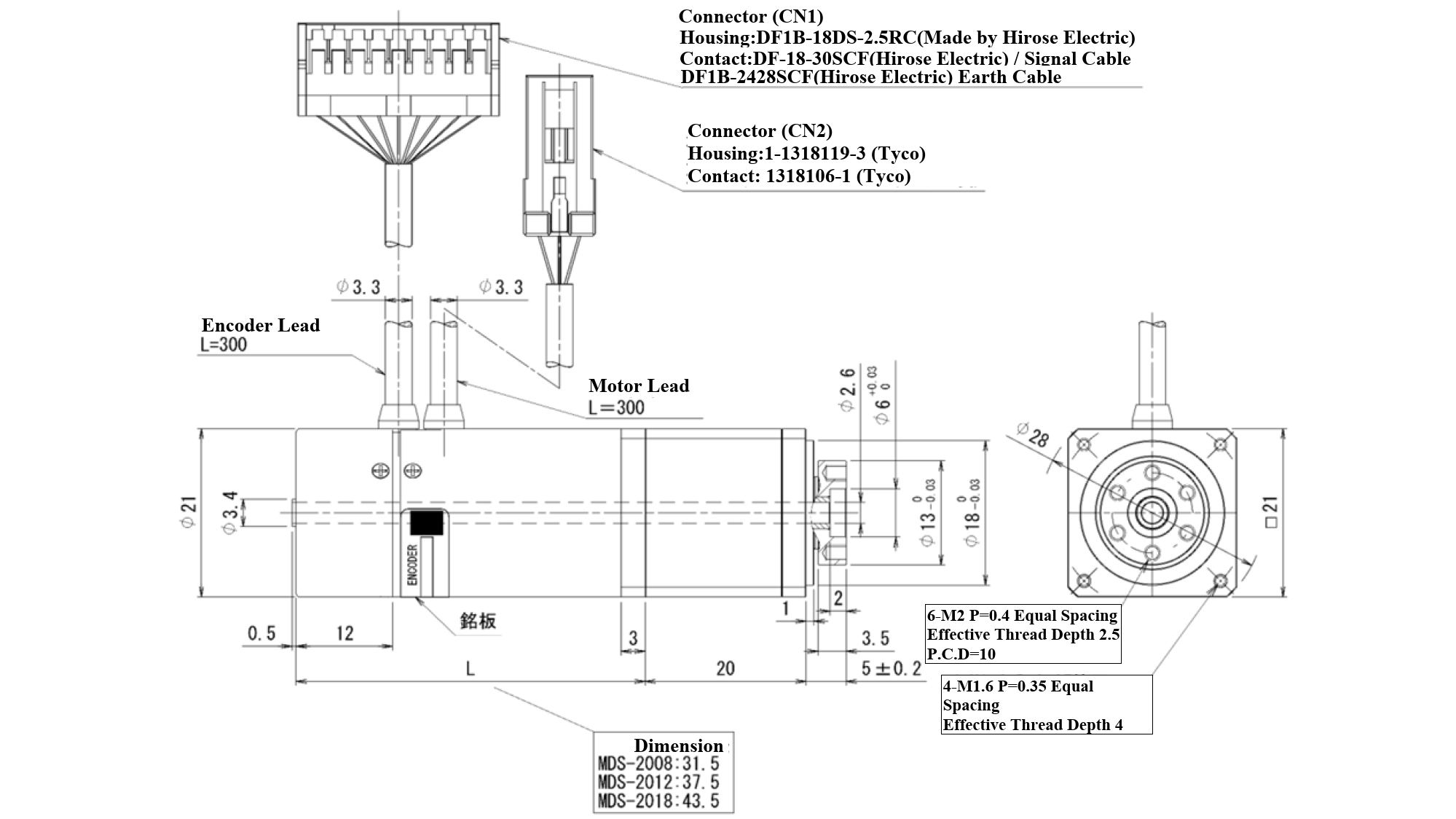
MDH-20 Geared Motor
World's smallest through-shaft servo motor.
Ideal for driving fingers and wrist of compact hands.
- Body Diameter:□21mm
Operating Hours: Weekdays 9:00 AM - 5:30 PM
| MD-2018 | MD20×1/3 Gear | MD20×1/9 Gear | ||
|---|---|---|---|---|
| Maximum Torque | N・m | 0.130 | 0.331 | 0.842 |
| Continuous Torque | N・m |
0.030 |
0.076 |
0.194 |
| Length | mm |
43.5 |
58.5 |
63.5 |
| Weight | g |
120 |
149 |
153 |
MDH20+1/3 Hollow Gear Motor (External Dimension)
MDH20+1/9 Hollow Gear Motor (External Dimension)

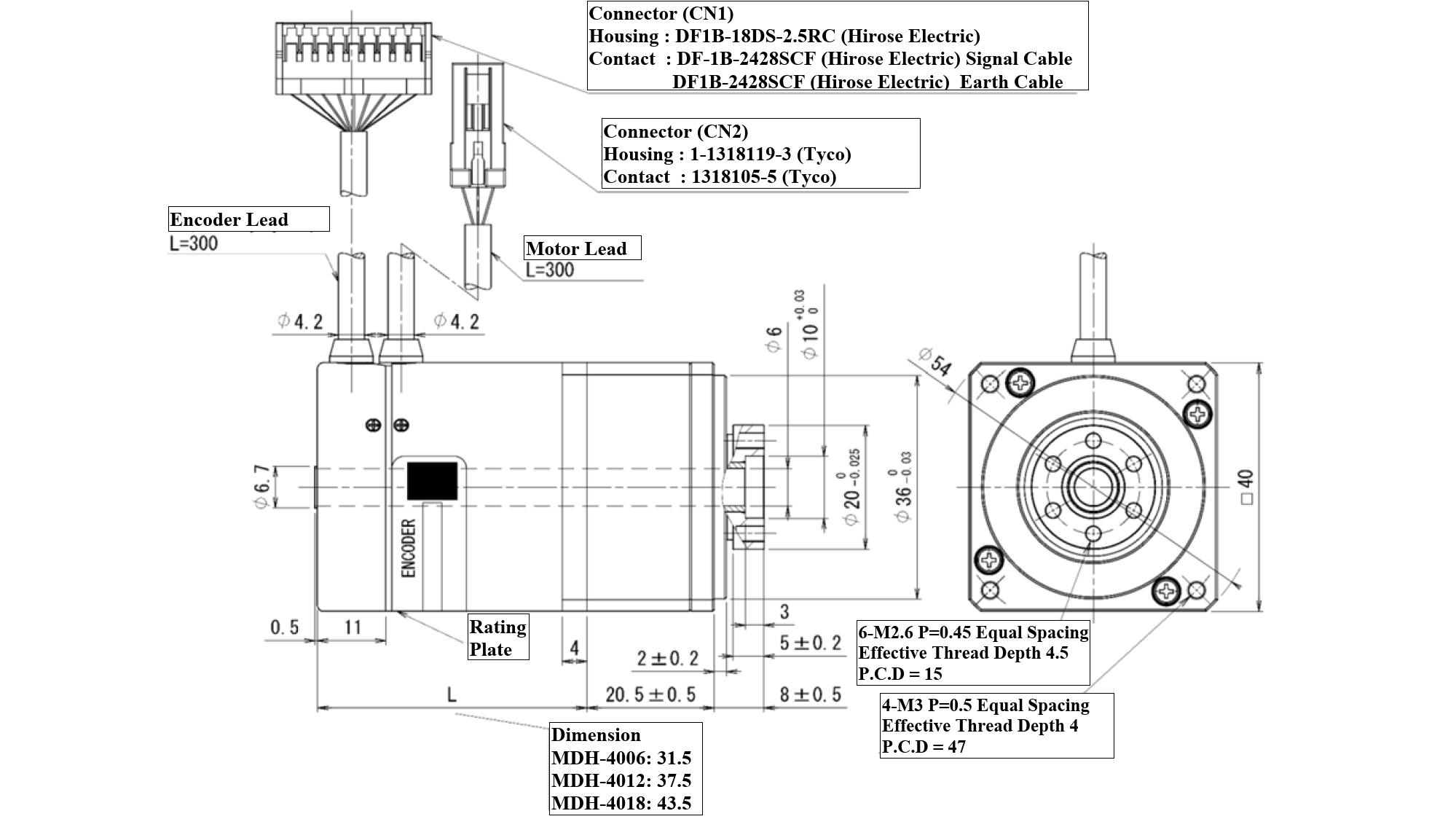
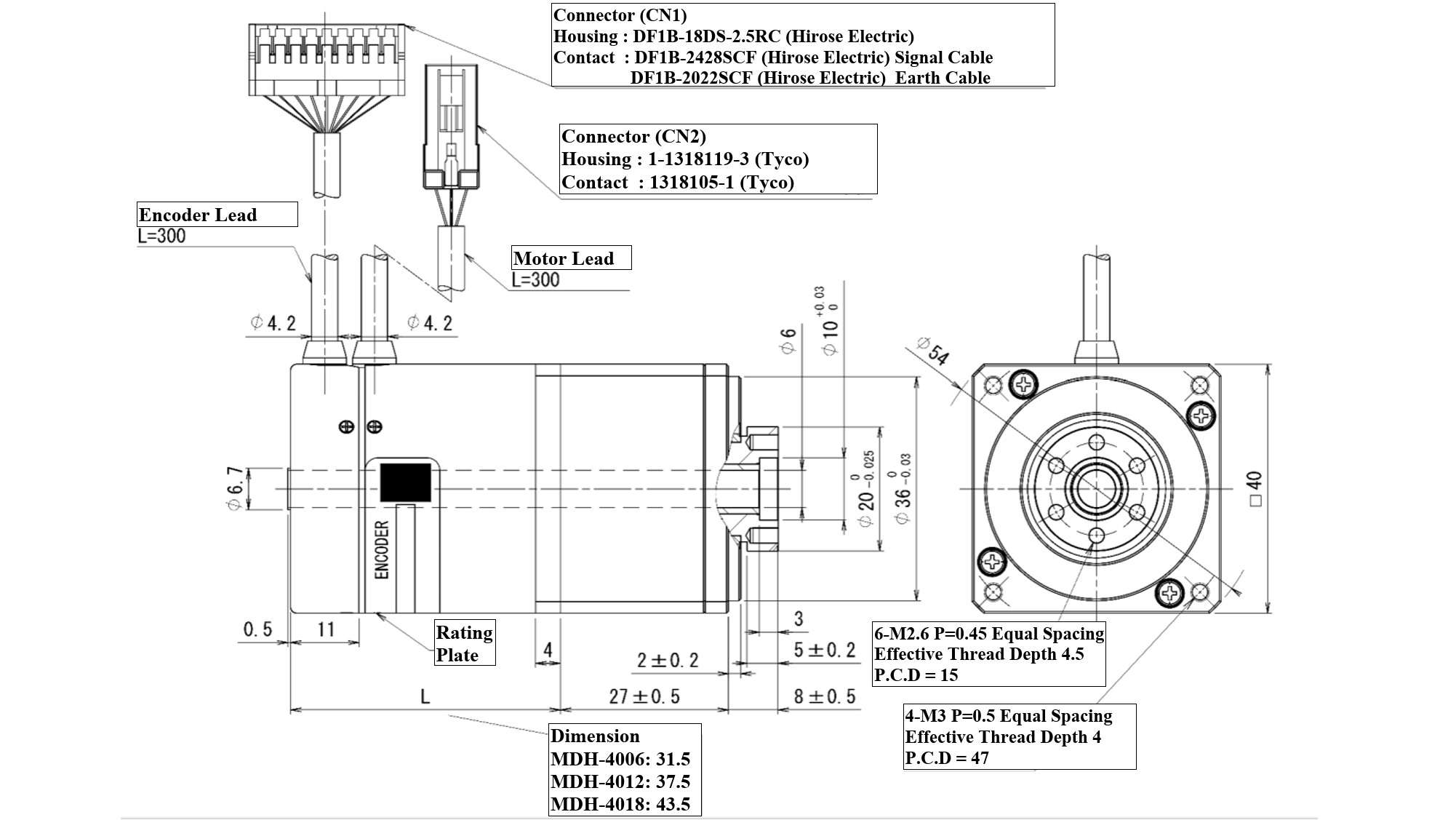
MDH-40 Geared Motor
Achieve both high torque and backdrivability
Ideal for driving fingers,wrist,and elbow of robot hands.
- Body Diameter:□40mm
| MD-4018 | MD40×1/3 Gear | MD40×1/9 Gear | ||
|---|---|---|---|---|
| Maximum Torque | N・m | 1.000 | 2.550 |
6.480 |
| Continuous Torque | N・m |
0.230 |
0.586 | 1.490 |
| Length | mm |
43.5 |
64.0 |
70.5 |
| Weight | g |
300 |
424 |
463 |
MDH40+1/3 Hollow Geared Motor (External Dimension)
MDH40+1/9 Hollow Geared Motor (External Dimension)
The Importance of Reduced Speed
Backdrivability
One of the significant advantages of using DD motors is backdriavility. As the gear ratio increases,backdrivability worsens,making it difficult to provide feedback on the load side`s condition. By reducing the gear ratio, it becomes possibles to provide feedback over a wide range, especially for small torque conditions.
What is Backdiravility?
Low-Inertia
While friction and efficiency can be improved through processing precision and deceleration methods, inertia momentum always comes into play. It significantly affects the motor`s responsiveness and acceleration/deceleration, leading to compromised agility in motion. By reducing teh gear ratio, it enables motor control with excellent responsiveness, including shock absorption and tactile
feedback.
Performing Shock Absorption Control at High Speed
[MagLinkage] Robot Hand
Unique
We have received numerous inquiries asking "Are there any gears that match μDD Motors?" Small
gears are readily available in the market, but they lack "Low Gear Ratio." This is because the added value of gears attached to motors has been high gear ratios and
low backlash. Gears that match the niche specifications of μDD Motors were also niche products themselves.
Due to the emphasis on the mentioned characteristics, please note that there is an approximate backlash of about 30 arc-minutes (approximately 0.5°). It may not be suitable for precision positioning applications.。
Robot Utilizing Low Gear Ratio
Real Haptics Prosthetic Hand
While providing torque equivalent to a human`s gripping strength, it takes advantage of backdrivability to enable high-preicision tactile feedback.
Bimanual Robot「GP-Arm」
Equipped with low gear ratio μDD Motors in the fingers,wrists,elbows,and shoulders, allowing for high-precision tactile feedback.
Compact & Low Friction Actuators
Multi-Finger Hand「MagLinkage」
Enabling precise feedback and absorb shock upon detecting contact through low gear ratio, resulting in high rensponsiveness.Driver Option
| Manufacturer | Driver Model (Amplifier) |
Interface | Power Supply |
Features |
|---|---|---|---|---|
| MTL | MC-200-7220A | Pulse Sequence,USB | DC24/48V | Compact General Purpose |
| MC-200-7220D | SPI 、USB | DC24/48V | Compact General Purpose | |
| MC-200C-6018D | SPI 、USB | DC24/48V | Ultra-Compact | |
| Mitsubishi Electronics |
MR-J4W2-0303B6-MX940J〇〇 | SSCNETⅢ/H | DC48V | 2-Axis Integrated |
| MR-J4-20A-RJJ001 | Pulse Sequence | AC200V | Collaboration Only | |
| MR-J4-20B-RJJ001 | SSCNETⅢ/H | AC200V | Collaboration Only | |
| Panasonic | MMDHT2B09ND1 | RTEX | DC48V | Compact |
| MBDLT25NF | RTEX | AC200V | Multi-Function Type | |
| MBDLT25BF | EtherCAT | AC200V | Multi-Function Type |
Note)
①Mitsubishi Electric and Panasonic amplifiers are not sold by our company.
Please consult the respective distributors.
②Mitsubishi Electric J4 Collaboration is compatible
only with the incermental encoder of our μDD Motors.
Connector Cables Option
| MC-200-7220A(※1)/MC-200-7220D/MC-200C-6018D(※2) | ||
|---|---|---|
| Specifications | Models | Cable Length |
| Power Supply Connector | CN1ケーブル(4.2)1M-TE | 1.0m |
| Motor Extension Connector Cable |
CN2 Flexible Cable (4.2)0.7M | 0.7m |
| CN2 Flexible Cable(4.2)2.7M | 2.7m | |
| CN2 Flexible Cable(4.2)4.7M | 4.7m | |
| Encoder Extension Connection Cable |
CN3 Flexible Cable(4.2)0.7M | 0.7m |
| CN3 Flexible Cable(4.2)2.7M | 2.7m | |
| CN3 Flexible Cable (4.2)4.7M | 4.7m | |
| miniUSB Cable | CN5 Cable | 1.0m |
| Mitsubishi Electric MR-J4W2-0303B6-MX940J〇〇 | ||
| Specifications | Models | Cable Length |
| Motor Extension Connection Cable |
CN2 Flexible Cable(4.2)0.7M | 0.7m |
| CN2 Flexible Cable(4.2)2.7M | 2.7m | |
| CN2 Flexible Cable(4.2)4.7M | 4.7m | |
| Motor Conversion Connector Cable |
CN2 Flexible Cable(4.2)0.2M-(CF) | 0.2m |
| Encoder Extension Connection Cable |
CN3 Flexible Cable(4.2)0.7M | 0.7m |
| CN3 Flexible Cable(4.2)2.7M | 2.7m | |
| CN3 Flexible Cable(4.2)4.7M | 4.7m | |
| Encoder Conversion Connector Cable |
CN3 Flexible Cable(4.2)0.2M-TE(J4W2) | 0.2m |
| miniUSB Cable | CN5 Cable | 1.0m |
| Mitsubishi Electric MR-J4-20A-RJJ001/MR-J4-20B-RJJ001 | ||
| Specifications | Models | Cable Length |
| Motor Extension Connection Cable |
CN2 Flexible Cable(4.2)0.7M | 0.7m |
| CN2 Flexible Cable(4.2)2.7M | 2.7m | |
| CN2 Flexible Cable(4.2)4.7M | 4.7m | |
| Motor Conversion Connection Cable |
CN2 Flexible Cable(4.2)0.2M-(CF) | 0.2m |
| Encoder Extension Connection Cable |
CN3 Flexible Cable(4.2)0.7M | 0.7m |
| CN3 Flexible Cable(4.2)2.7M | 2.7m | |
| CN3 Flexible Cable(4.2)4.7M | 4.7m | |
| Encoder Conversion Connection Cable |
CN3 Flexible Cable(4.2)0.2M-TE(J4) | 0.2m |
| miniUSB Cable | CN5 Cable | 1.0m |
| Panasonic MMDHT2B09ND1 | ||
| Specifications | Models | Cable Lenth |
| Motor Extension Connector Cable |
CN2 Flexible Cable(4.2)0.7M | 0.7m |
| CN2 Flexible Cable(4.2)2.7M | 2.7m | |
| CN2 Flexible Cable(4.2)4.7M | 4.7m | |
| Motor Conversion Connection Cable |
CN2 Flexible Cable(4.2)0.2M-TE(M枠) | 0.2m |
| Encoder Extension Connector Cable |
CN3 Flexible Cable(4.2)0.7M | 0.7m |
| CN3 Flexible Cable(4.2)2.7M | 2.7m | |
| CN3 Flexible Cable(4.2)4.7M | 4.7m | |
| Encoder Conversion Connection Cable |
CN3 Flexible Cable(5.6) 0.2M-JST(MINAS) |
0.2m |
| miniUSB Cable | CN5 Cable | 1.0m |
| Panasonic MBDLT25NF/MBDLT25BF | ||
| Specifications | Models | Cable Length |
| Motor Extension Connection Cable |
CN2 Flexible Cable(4.2)0.7M | 0.7m |
| CN2 Flexible Cable(4.2)2.7M | 2.7m | |
| CN2 Flexible Cable(4.2)4.7M | 4.7m | |
| Motor Conversion Connection Cable |
CN2 Flexible Cable(4.2)0.2M-(CF) | 0.2m |
| Encoder Extension Connection Cable |
CN3 Flexible Cable(4.2)0.7M | 0.7m |
| CN3 Flexible Cable(4.2)2.7M | 2.7m | |
| CN3 Flexible Cable (4.2)4.7M | 4.7m | |
| Incremental Encoder Connection Cable |
CN3 Flexible Cable(5.6)0.2M-JST (MINAS) |
0.2m |
| Absolute Encoder Connection Cable |
MFC-10P |
0.2m |
| miniUSB Cable | CN5 Cable | 1.0m |
※1: The CN4 connector cable for MC-200-7220A needs to be provided by the user.
(Connector Model: 10136-3000PE)
※2:The CN1/CN4 connector cables for MC-200C and the conversion connector cables
for CN2/CN3 are included
Please contact us if you require documents or sample.
Contact:Aoyagi
Mail:aoyagi@mtl.co.jp
Journal of Robotics Society of Japan
Backdrivability of Robots and Actuators (Yasukazu Suzumori, Okayama University)
https://www.jstage.jst.go.jp/article/jrsj/31/6/31_31_548/_pdf
製品のお問い合わせはこちら
042-746-0123
受付 / 平日9:00~17:30

